- Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 1
- Введение
- Аппаратная платформа
- Комплект инструментов
- Установка OpenOCD
- Подключение адаптера SAM-ICE
- Совместная работа адаптера SAM-ICE и сервера отладки OpenOCD
- Создание комплекта в Qt Creator
- Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 2
- Создание, запуск и отладка примитивной программы на Atmel SAM4S микроконтроллере
- Библиотека Atmel Software Framework
- Среда Atmel Studio IDE
- Добавление модуля из библиотеки ASF
- Код простейшей программы
- Сборка с помощью системы автоматизации QBS
- Заключение
Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 1
Представляем электронную версию статьи из номера №2 за 2016 год журнала Компоненты и технологии. Автор Курниц Андрей.
В статье описан процесс развертывания экосистемы разработки приложений для микроконтроллеров Atmel серии SAM4S в среде операционной системы Linux. Читатель познакомится также с оценочной платой SAM4S-EK и семейством ARM Cortex-M4 микроконтроллеров фирмы Atmel. Приведены рекомендации по работе с адаптером отладки SAM-ICE (он же J-LINK) и программой OpenOCD.
Введение
Выбор операционной системы Linux в качестве среды для программирования микроконтроллеров ARM Cortex-M4 фирмы Atmel сложно назвать общепринятой практикой. Напротив, для разработки под свои микроконтроллеры Atmel свободно распространяет среду Atmel Studio 7, предназначенную исключительно для операционных систем Windows. Не будет секретом и тот факт, что разворачивание и настройка среды Atmel Studio 7 для новичка окажется куда проще, чем выбранный автором путь.
Автор предлагает использовать среду разработки Qt Creator в связке с инструментарием для кросс-компиляции GCC и с пакетом OpenOCD для отладки. В качестве операционной системы автор выбрал Linux Lubuntu 14.04 LTS (выполняющуюся на виртуальной машине, но это не существенно). Такой подход позволяет с легкостью переходить на другие ARM (и не только) микроконтроллеры, не меняя при этом привычный комплект инструментов. Например, в [1] приводится пример разработки для микроконтроллеров STM32F4 фирмы ST microelectronics с применением такого же комплекта инструментов.
Несколько слов об используемой терминологии. Аппаратное устройство, которое подключается к целевому микроконтроллеру и к рабочей станции, далее называется отладочным адаптером. Отладчиком же будет называться компьютерная программа, служащая для пошагового выполнения программы, просмотра значений ячеек памяти и т.д.
Аппаратная платформа
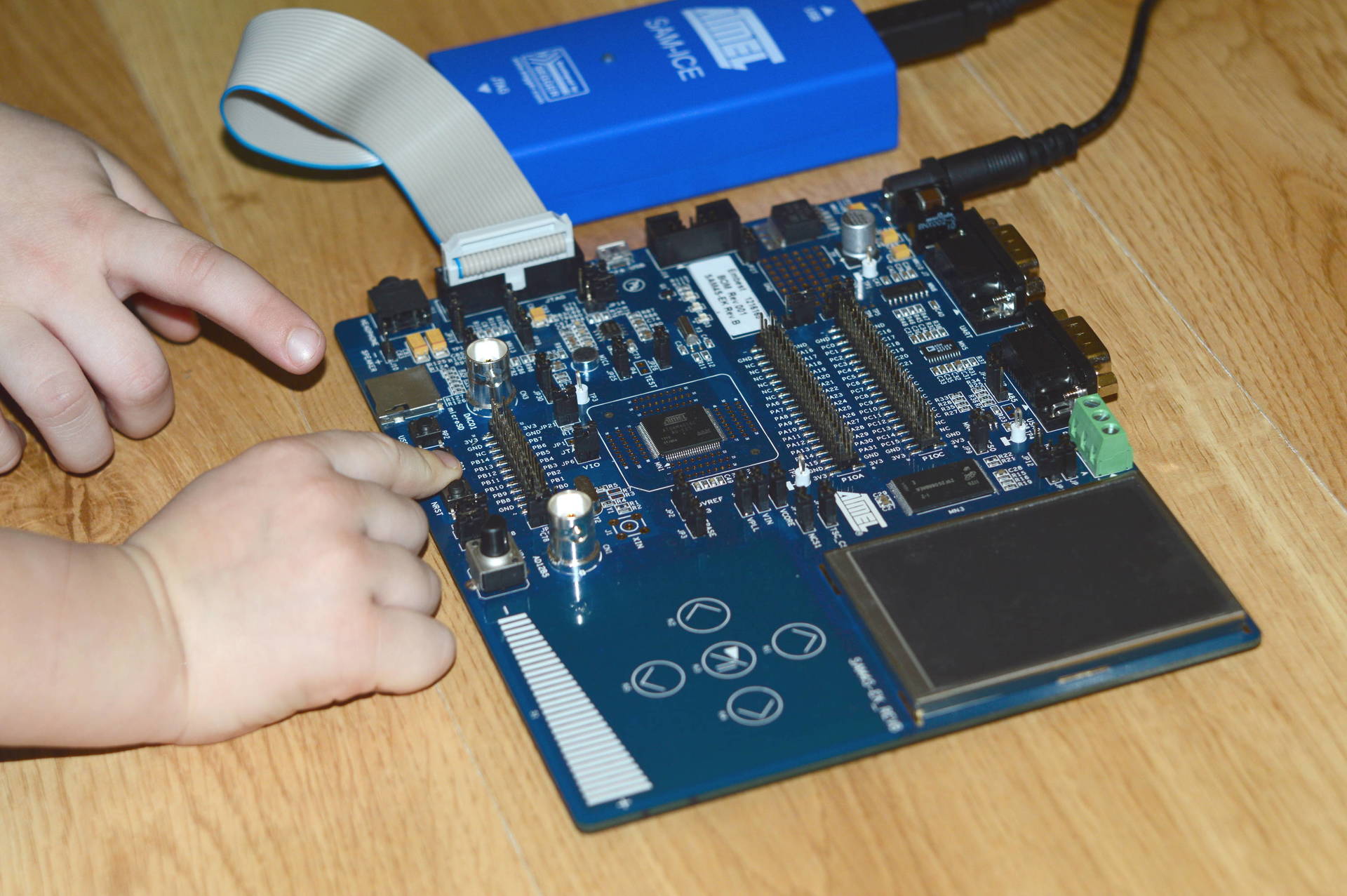
Рис. 1. Внешний вид платы SAM4S-EK с подключенным отладочным адаптером.
В основе оценочной платы лежит микроконтроллер SAM4S16C фирмы Atmel, ключевые особенности которого приведены ниже:
- Ядро ARM Cortex-M4, максимальная тактовая частота 120МГц
- Объемы памяти на кристалле: 1 Мбайт flash-памяти и 128 кбайт ОЗУ
- Среди периферийных устройств можно выделить: USB контроллер (работа только в режиме Device), контроллер внешней NAND flash-памяти, контроллер SD карт памяти
- Контроллеры интерфейсов UART, I2C, SPI и др.
- 100-выводный корпус
Среди особенностей оценочной платы SAM4S-EK можно выделить следующие:
- Микросхема NAND flash-памяти Micron MT29F2G08ABAEA объемом 2 Гбит
- Цветной дисплейный модуль FTM280C34D разрешением 320×240 точек, с диагональю 2,8 дюйма и с резистивной сенсорной панелью. Дисплей содержит встроенный контроллер Ilitek ILI9320, подключенный к микроконтроллеру по параллельному интерфейсу.
- Контроллер резистивной сенсорной панели Texas Instruments ADS7843E
- Распаяны два DB9 разъема для двух портов RS-232 (один из них — с сигналами RTS, CTS), выведен также интерфейс RS-485
- Элементы сенсорного управления по технологии Atmel QTouch, расположены прямо на печатной плате (сенсорные кнопки 5 шт. и слайдер)
- Электретный микрофон и операционный усилитель TS922 для него
- Усилитель звуковой частоты для подключения наушников TPA022, а также 3,5мм гнездо типа «джек».
- Два коаксиальных BNC разъема, которые подключены к встроенным АЦП и ЦАП блокам микроконтроллера.
- Держатель micro-SD карты памяти
- 63 вывода общего назначения (GPIO) выведены на IDC разъемы с шагом 2,54 мм
Более подробно как о плате SAM4S-EK, так и о микроконтроллере SAM4S16C можно ознакомиться на сайте Atmel [12].
Комплект инструментов
Когда аппаратная (плата SAM4S-EK) и программная (операционная система Linux Lubuntu) платформы определены, можно построить систему аппаратных и программных инструментов для программирования и отладки целевого микроконтроллера (рис. 2) 
Рис. 2. Структурная схема процесса отладки микроконтроллера
Микроконтроллер по интерфейсу JTAG подключен к отладочному адаптеру SAM-ICE, который в свою очередь подключен к рабочей станции по интерфейсу USB. Питание отладочного адаптера подается также по интерфейсу USB, а питание платы разработчика вместе с микроконтроллером должно осуществляться отдельно (на рис. 2 не показано).
На рабочей станции должна выполняться некая программа, которая будет взаимодействовать с адаптером отладки SAM-ICE с одной стороны и отладчиком GDB, входящим в инструментарий GCC, с другой. На эту роль идеально подходит свободно распространяемая программа OpenOCD 5, которая помимо отладки может использоваться для загрузки прошивки во flash-память микроконтроллера и для внутрисхемного тестирования.
Программа OpenOCD поддерживает как адаптер отладки SAM-ICE (в действительности это аналог популярного J-LINK), так и оценочную плату SAM4S-EK (соответственно и микроконтроллеры Atmel SAM4). Кроме этого OpenOCD доступна в виде исходных кодов и может быть собрана для операционной системы Linux.
Интегрированная среда разработки Qt Creator (рис. 2) получает отладочную информацию через отладчик GDB и предоставляет в удобном для разработчика виде (точки останова, значения переменных, пошаговое выполнение программы и др.)
Программа OpenOCD работает в режиме сервера и допускает подключение других клиентов-программ, например, telnet-клиента (рис. 2). Это может быть удобно для серийного программирования микроконтроллеров на производстве.
Установка OpenOCD
Установить OpenOCD можно наименее трудоемким способом — из репозиториев Ubuntu, для чего следует выполнить команду:
Однако в этом случае будет установлена устаревшая версия 0.7.0 (проверить версию установленной программы OpenOCD можно выполнив команду openocd —version).
Для получения актуальной версии (на момент написания статьи — 0.9.0), необходимо собрать OpenOCD из исходных кодов. Для этого надо выполнить следующие действия:
1. Загрузить исходные коды OpenOCD с сайта [2], выполнив команду:
В результате в домашнем каталоге должен появиться файл-архив openocd-0.9.0.tar.bz2.
2. Далее следует разархивировать OpenOCD, выполнив команду:
В результате, в домашнем каталоге должен появиться каталог с исходным кодом openocd-0.9.0
3. Проверить, установлена ли библиотека libusb-dev, которая необходима для взаимодействия рабочей станции и адаптера SAM-ICE по USB интерфейсу. Чтобы проверить наличие библиотеки libusb-dev, следует выполнить команду:
Если библиотека установлена, то вывод должен быть примерно такой:
Если библиотека не установлена, то ее установить ее можно, выполнив команду:
4. Для сборки OpenOCD также потребуются следующие пакеты:
- make,
- libtool,
- pkg-config версии 0.23 и выше,
- autoconf версии 2.64 и выше,
- automake версии 1.9 и выше,
- texinfo
Проверить их наличие можно тем же способом, что и библиотеки libusb-dev, как описано выше.
5. Теперь можно собрать пакет OpenOCD с поддержкой адаптера SAM-ICE, для чего следует последовательно выполнить следующие команды:
Ключ —enable-jlink предписывает включить поддержку адаптера J-LINK. Дело в том, что адаптер SAM-ICE представляет собой модифицированный J-LINK BASE от фирмы Segger так, что он может работать только с микроконтроллерами фирмы Atmel. Однако программный интерфейс для работы с J-LINK полностью совместим с адаптером SAM-ICE.
Подключение адаптера SAM-ICE
Далее следует подключить адаптер SAM-ICE к рабочей станции и проверить список подключенных по USB устройств командой:
lsusb
Если адаптер SAM-ICE подключен, то вывод команды должен содержать следующую строку:
Где 1366 — VID-номер (код производителя USB-устройства), 0101 — PID-номер (код изделия). Эти номера потребуются в дальнейшем для настройки менеджера устройств udev.
Чтобы обеспечить взаимодействие сервера отладки OpenOCD с адаптером SAM-ICE по интерфейсу USB необходимо создать файл-правило для менеджера устройств udev, например, так:
В окне редактора Nano ввести следующий текст:
Где поля idVendor и idProduct соответствуют полученным ранее номерам VID и PID.
Далее следует перезагрузить рабочую станцию.
Если же сконфигурировать udev, как описано в [3], то запуск сервера отладки OpenOCD будет возможен только с правами суперпользователя, что в дальнейшем создаст проблемы с отладкой из среды QtCreator.
Совместная работа адаптера SAM-ICE и сервера отладки OpenOCD
/sam/) создать файл конфигурации openocd.cfg со следующим содержимым:
Файл openocd.cfg содержит предписания для сервера OpenOCD, а именно:
- разрешить подключение к серверу по протоколу telnet через порт 4444,
- установить порт 3333 для подключения отладчика GDB,
- соединяться с адаптером J-LINK (SAM-ICE),
- целевая платформа — оценочная плата Atmel SAM4S_EK,
- разрешить программирование flash-памяти.
Теперь, когда необходимое программное обеспечение установлено, а отладчик подключен к рабочей станции и целевому микроконтроллеру, можно проверить работоспособность системы. Для этого следует, находясь в каталоге проекта (
/sam/), запустить сервер OpenOCD командой
Если все сделано правильно, в терминал будет выведено:
При этом приглашение командной строки выведено не будет, что свидетельствует о том, что сервер успешно запущен и установлено соединение с целевым микроконтроллером через отладочный адаптер SAM-ICE.
Теперь можно подключиться к серверу отладки по протоколу telnet, для чего надо открыть второй терминал и выполнить команду:
Где 4444 – номер порта, заданный ранее в конфигурационном файле openocd.cfg. В результате будет установлено соединение с сервером отладки и появится приглашение для ввода команд:
Когда соединение с сервером установлено, можно выполнить любую из команд OpenOCD (полный список — в [7]), например, просмотреть содержимое регистров ядра микроконтроллера. Для этого следует остановить выполнение программы в микроконтроллере командой halt:
Затем просмотреть непосредственно содержимое регистров командой reg:
Завершить работу сервера OpenOCD можно командой shutdown, при этом автоматически закроется и telnet соединение:
Связку «адаптер SAM-ICE – программа OpenOCD» можно использовать для серийного производства для загрузки готовой прошивки во flash-память микроконтроллера. Например, чтобы очистить всю flash-память микроконтроллера Atmel SAM4S16C, необходимо выполнить команду:
Где 0x00400000 — адрес начала flash-памяти в адресном пространстве, 0x100000 — размер flash-памяти в шестнадцатеричной системе счисления, для микроконтроллера SAM4S16C составляет 1 Мбайт = 2^20 байт = 0x100000(16) байт. Адрес начала flash-памяти и ее размер получен из документации на данный микроконтроллер [12].
В случае успешного стирания вывод программы OpenOCD должен содержать строку:
Для непосредственно записи прошивки во flash-память надо выполнить команду:
Где sam.hex — имя файла с прошивкой в формате Intel HEX. OpenOCD принимает также другие форматы файлов с прошивкой, например binary и ELF.
В случае успешной загрузки прошивки во flash-память вывод должен содержать строки:
То есть в данном случае очищается лишь те сектора flash-памяти, в которые будет размещена прошивка.
Создание комплекта в Qt Creator
Теперь, когда связка «адаптер отладки — сервер отладки» настроена и готова к работе, можно приступать к настройке интегрированной среды разработки, в нашем случае — Qt Creator.
При этом предполагается, что на рабочую станцию уже установлен инструментарий GCC для сборки для микроконтроллеров ARM, а также установлена и настроена сама среда Qt Creator, процесс установки и настройки которых подробно описан в [1].
Прежде всего, необходимо добавить сервер отладки, для этого в Qt Creator следует вызвать настройки (пункт главного меню «Инструменты –> Параметры…»), выбрать вкладку «BareMetal» («Голое устройство»), нажать «Добавить» и выбрать пункт «OpenOCD». Появится окно, где можно указать параметры запуска сервера (рис. 3). Следует отметить, что поддержка OpenOCD добавляется в среду Qt Creator при включении модуля «BareMetal», как это сделать — описано в [1]. 
Рис. 3. Добавление сервера отладки OpenOCD в Qt Creator.
Имя сервера отладки можно задать «OpenOCD + SAM-ICE» (рис. 3), «Режим запуска» следует установить в «Запуск в режиме TCP/IP», так как сервер OpenOCD будет выполняться на рабочей станции, то поле «Хост» должно содержать имя компьютера «localhost» и порт 3333, указанный ранее в конфигурационном файле openocd.cfg.
В поле «Исполняемый файл» следует вписать имя исполняемого файла openocd (или полный путь к нему, если необходимо). Поле «Файл конфигурации» должно содержать путь к файлу конфигурации OpenOCD, созданному ранее, в данном случае это
sam/openocd.cfg. Поля «Команды инициализации» и «Команды сброса» по умолчанию содержат команды управления сервером, менять их содержимое не требуется.
Далее можно добавить новое устройство, для которого будет производиться сборка и отладка — микроконтроллер семейства Atmel SAM4S. Для этого в настройках Qt Creator следует выбрать вкладку «Устройства» и нажать «Добавить…».
После чего ввести имя устройства, например «Atmel SAM» и выбрать настроенный ранее сервер отладки «OpenOCD + SAM-ICE».
Когда устройство добавлено, можно окончательно настроить комплект для сборки так, как показано на рис. 4.
Рис. 4. Добавление комплекта для микроконтроллеров Atmel SAM4S в Qt Creator.
Компилятор GCC и отладчик GDB заданы из состава инструментария GCC для микроконтроллеров ARM так, как описано в [1].
Продолжение статьи будет оформлено в виде отдельной публикации, чтобы не раздувать объем.
Источник
Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 2
Продолжение электронной версии статьи из номера №2 за 2016 год журнала Компоненты и технологии. Автор Курниц Андрей. Ссылка на первую часть
Создание, запуск и отладка примитивной программы на Atmel SAM4S микроконтроллере
Теперь, когда на рабочую станцию установлено и настроено программное обеспечение для разработки под Atmel SAM4S микроконтроллеры, можно убедиться в работоспособности системы, создав простейшую программу, которая будет зажигать и гасить светодиод на плате SAM4S-EK.
Чтобы собрать работоспособную программу для микроконтроллера, помимо инструментария GCC необходимы следующие компоненты:
- Библиотека CMSIS (Cortex Microcontroller Software Interface Standard) — описывает единый интерфейс взаимодействия с ядром микроконтроллеров ARM Cortex-M — общая для микроконтроллеров ARM Cortex-M различных производителей.
- Библиотека для взаимодействия с периферией данного семейства микроконтроллеров — своя для каждого производителя, будь то Atmel, STMicroelectronics, NXP и др.
- Скрипт линковщика (linker script) — файл с указаниями о размещении программы во flash-памяти микроконтроллера, а также о размещении в ОЗУ служебных областей (секций): стек, куча и др. Для различных микроконтроллеров с разными объемами памяти используются соответственно различные скрипты линковщика.
- Файл syscalls.c — содержит системные функции, необходимые для работы стандартной библиотеки языка C (реализация newlib). Обычно эти функции являются частью операционной системы, для которой предназначена программа. Однако в случае же микроконтроллера, который чаще всего работает без операционной системы, в сборку должен быть включен файл syscalls.c, содержащий в большинстве своем пустые системные функции [10].
- Справедливости ради следует отметить, что существует множество операционных систем, разработанных специально для микроконтроллеров.
- Код начальной инициализации (startup code) — отвечает за заполнение таблицы векторов прерываний соответствующими обработчиками, в том числе и обработчиком прерывания по сбросу микроконтроллера (reset handler).
- Также содержит реализацию обработчика прерывания по сбросу, который обнуляет необходимые секции памяти, инициализирует стандартную библиотеку C и передает управление в точку входа программы — в функцию main().
Библиотека Atmel Software Framework
400 Мбайт, содержащий более 70000 файлов).
Даже не смотря на то, что библиотеку ASF можно загрузить отдельно [8] и она рассчитана на использование в том числе и компилятора GCC, однако автор не сумел вручную выделить из библиотеки необходимые файлы для создания простейшей программы для микроконтроллера Atmel SAM4S16C.
Автор предлагает такой путь:
1.Чтобы получить минимальный компилируемый проект использовать интегрированную среду разработки Atmel Studio IDE, предназначенную для операционных систем Windows и основанную на среде Microsoft Visual Studio 2013.
2. В дальнейшем «вручную» добавлять необходимые компоненты в полученный проект, копируя их из отдельно загруженной библиотеки ASF.
Среда Atmel Studio IDE
Среда Atmel Studio IDE поставляется бесплатно, загрузить ее можно с официального сайта [9]. Во время установки на компьютере или виртуальной машине под управлением Windows следует выбрать архитектуру ARM и указать необходимость установить библиотеку ASF (рис. 5).
Рис. 5. Особенности установки Atmel Studio IDE.
После установки следует запустить Atmel Studio IDE и создать новый проект, выбрав пункт меню «File -> New -> Project…». Далее следует выбрать тип проекта «GCC C ASF Board Project», как показано на рис. 6.
Рис. 6. Выбор типа проекта в Atmel Studio IDE.
Далее откроется окно выбора аппаратной платформы, для которой будет собираться проект (рис. 7)
Рис. 7. Выбор микроконтроллера
Можно ввести название микроконтроллера, но в данном случае проще задать название оценочной платы. Для этого следует выбрать пункт «Select by Board» и выбрать название «SAM4S-EK» (рис. 7). В списке ниже следует выбрать появившийся пункт с наименованием микроконтроллера «ATSAM4S16C» и нажать «Ok».
После того, как проект будет создан, файлы исходного кода будут размещены в указанном ранее (рис. 6) каталоге (в случае автора c:\Users\andrey_k\Documents\Atmel Studio\7.0\GccBoardProject1\GccBoardProject1\src).
Каталог src теперь можно перенести в операционную систему Linux в каталог проекта, например, в каталог
/sam/. Его структура представлена на рис. 8.
Рис. 8. Структура простейшего проекта
Внимание следует обратить на расположение:
- Скрипт линковщика — это файл
/sam/src/ASF/sam/utils/linker_scripts/sam4s/sam4s16/gcc/flash.ld
Код начальной инициализации и таблица векторов прерываний находится в файле
/sam/src/ASF/sam/utils/cmsis/sam4s/source/templates/gcc/startup_sam4s.c
Файл syscalls.c находится в каталоге
Добавление модуля из библиотеки ASF
/sam/src/ASF/common/services/delay.
Кроме этого необходимо включить компонент delay.h в сборку, добавив в конце файла
Как видно, добавление отдельных компонентов из библиотеки ASF в проект не представляет больших трудностей.
Код простейшей программы
Листинг файла main.c приведен ниже:
Функция board_init() инициализирует порты ввода/вывода (GPIO) микроконтроллера в соответствии с подключенными к ним внешними электронными компонентами, в том числе настраивает порты ввода/вывода как выходы для включения/выключения расположенных на плате светодиодов. Функция board_init() находится в файле src/ASF/sam/borads/sam4s_ek/init.c.
Предоставлена возможность выбирать, какие порты будут проинициализированы, а какие нет — с помощью макроопределений в файле src/config/conf_borad.h.
Функция sysclk_init() отвечает за инициализацию блока тактирования микроконтроллера. После сброса включается встроенный RC-генератор на 4 МГц [12]. Функция sysclk_init() активирует генератор, работающий от внешнего кварцевого резонатора на 12 МГц, а также настраивает блок фазовой автоподстройки частоты PLL, так, чтобы частота тактирования ядра микроконтроллера составляла 120МГц.
Изменить настройки тактирования можно меняя значения макроопределений в файле src/config/conf_clock.h.
Далее в бесконечном цикле последовательно вызываются функции включения и выключения светодиодов оценочной платы: LED_On() и LED_Off(). В качестве аргумента передается макроопределение LED1_GPIO, что соответствует зеленому светодиоду, подключенному к порту PA20. Функции LED_On(), LED_Off() и макроопределение LED1_GPIO определены в исходных файлах в каталоге src/ASF/sam/borads/sam4s_ek/, который содержит помимо прочего описание подключения светодиодов к выводам микроконтроллера.
Вызов функции delay_ms(500), входящей в добавленный ранее модуль delay.h, приводит к задержке выполнения на 0,5 секунды. Задержка реализована пустыми циклами микроконтроллера, причем нет необходимости заботиться об учете частоты тактирования микроконтроллера — текущая частота учитывается внутри библиотеки ASF после вызова функции sysclk_init().
Сборка с помощью системы автоматизации QBS
Чтобы получить исполняемый файл прошивки необходимо выполнить компиляцию довольно большого количества файлов. Фирма Atmel предлагает пользоваться файлами makefile, которые представляют собой инструкции компилятору GCC.
Автор же предлагает воспользоваться встроенной в Qt Creator средой автоматизации сборки QBS [1]. Для этого придется создать QBS файл проекта, содержащий сведения об исходных файлах, подлежащих компиляции.
Одним из преимуществ QBS является то, что нет необходимости вручную вносить название каждого файла с исходным кодом в QBS файл — достаточно указать каталоги размещения файлов, остальное система сделает сама.
В случае успешной release сборки (release — т.е. не для отладки, окончательной) QBS файл содержит предписания выполнить следующие действия:
- Вывести в консоль сборки размер прошивки,
- конвертировать файл прошивки из формата ELF в формат Intel HEX
- Загрузить файл в целевой микроконтроллер через адаптер SAM-ICE, используя программу OpenOCD
Заключение
В результате вышеприведенных действий создана экосистема для разработки под микроконтроллеры Atmel SAM4S, полностью состоящая из свободно распространяемых программ. Экосистему несложно модифицировать для использования другого ARM микроконтроллера фирмы Atmel.
Загрузить готовый проект можно по адресу [11]. Для его использования понадобится операционная система Ubuntu или производная от нее (Lubuntu, Kubuntu, Xubuntu) с установленными пакетами:
- инструментарий GCC для ARM микроконтроллеров [1]
- среда разработки Qt Creator [1]
- программа OpenOCD (установка описана выше)
Источник



