- Как и где скачать Betaflight Configurator и BLHeli
- Скачать Betaflight конфигуратор для прошивки квадрокоптера
- Скачать конфигуратор BLHeli и BlHeli Suite 32
- BLHeli_S RPM-фильтрация. Делаем лучшую PID-настройку для снижения вибрации
- Зачем нужная RPM-фильтрация в Blheli_s?
- Поддерживают ли ваши ESC и полетный контроллер RPM?
- Обновление Betaflight
- Настройки Betaflight
- Заключение
- BLHeli конфигуратор для прошивки регуляторов
- В этой статье я расскажу как прошивать регуляторы в BLHeli конфигураторе, что означают его настройки и как правильно прошивать регуляторы.
Как и где скачать Betaflight Configurator и BLHeli
 Betaflight Configurator и BLHeli созданы для прошивки компонентов квадрокоптера, Betaflight прошивает полетные контроллеры, а BLHeli прошивает регуляторы оборотов. Программы просто незаменимые для каждого пилота дрона. И вот недавно появилась не очень хорошая новость от Google, что они закрывают поддержку приложений в своем браузере, а эти прошивальщики были сделаны именно для хрома и все пользовались в основном этими приложениями. Google ничего не убрал из своего магазина приложений для Хрома и там по прежнему можно скачать нужный нам конфигуратор.
Betaflight Configurator и BLHeli созданы для прошивки компонентов квадрокоптера, Betaflight прошивает полетные контроллеры, а BLHeli прошивает регуляторы оборотов. Программы просто незаменимые для каждого пилота дрона. И вот недавно появилась не очень хорошая новость от Google, что они закрывают поддержку приложений в своем браузере, а эти прошивальщики были сделаны именно для хрома и все пользовались в основном этими приложениями. Google ничего не убрал из своего магазина приложений для Хрома и там по прежнему можно скачать нужный нам конфигуратор.
Была еще и вот такая новость, что в 2018 совсем закроют магазин гугла:
В августе 2016 года Google объявил о намерении прекратить поддержку Chrome Apps на всех платформах, кроме Chrome OS. План состоит в том, чтобы начать прекращение работы приложений в середине 2017 года, а в начале 2018 не будут работать почти все приложения для браузера Google Chrome. Новость эта печальная, но Google заявили, что приложениями пользовались менее 1% пользователей.
Но сегодня 2021 год и все на месте, так что пользуемся 
Вполне возможно, что в этот 1% как раз мы и входили, пилоты квадрокоптеров, ведь мы используем как минимум 2 из этих 3 приложений:
- конфигуратор Betaflight,
- конфигуратор BLHeli
- проводник Blackbox
Приложения можно найти через поиск магазина: https://chrome.google.com/webstore, но если вы хотите все это поставить на свой компьютер, то читаем ниже.
Скачать Betaflight конфигуратор для прошивки квадрокоптера
Конфигуратор Betaflight и Blackbox Explorer теперь доступны как автономные и независимые приложения.
- Скачать Конфигуратор Betaflight
Betaflight можно запускать как отдельное приложение для Windows, Mac и Linux. Его можно загрузить со страницы Github:
https://github.com/betaflight/betaflight-configurator/releases
Подробнее как настроить и использовать конфигуратор на русском языке написано в этой статье: Betaflight configurator, настройка на русском
Скачайте архив и разархивируйте его где-нибудь у себя на компьютере, после чего запустите исполняемый файл.

- Betaflight Blackbox Explorer
Скачивается и устанавливается точно также, как и приложение выше. Его тоже нельзя запустить как раньше, теперь это отдельное автономное приложение. Ссылка на Гитхаб.ком:
https://github.com/betaflight/blackbox-log-viewer
Скачать конфигуратор BLHeli и BlHeli Suite 32
На Github можно скачать установщик BLHeli Configurator на компьютер отдельной программой, а не приложением для хрома.
Источник
BLHeli_S RPM-фильтрация. Делаем лучшую PID-настройку для снижения вибрации
В этой статье вы узнаете, как включить RPM-фильтрацию в BLHELI_S ESC и в Betaflight. RPM-фильтрация позволяет полетному контроллеру использовать телеметрию с регуляторов оборотов для лучшего управления PID-циклом.
Статья рассчитана на опытных пилотов и на стандартные 5-дюймовые дроны, если вы еще новичок, советуем для начала почитать статьи из раздела Полный справочник пилота.
Зачем нужная RPM-фильтрация в Blheli_s?
Для начала вам нужно понять, как работает полетный контроллер и PID. Когда вы двигаете стики на пульте управления, полетный контроллер квадрокоптера посылает сигналы на регуляторы оборотов (ESC), а те в свою очередь меняют обороты двигателей и квадрокоптер с определенной скоростью выполняет крен, тангаж или рыскание, а по простому — наклоняется или поворачивает в какую-либо сторону. В это же время используются PID-циклы, это функция, которая решает, сколько оборотов двигателю сделать в тот или иной момент полета. Настройки PID используются для корректировки различных проблем, например, чтобы избавиться от вибрации. Для помощи в отладке, существует Blackbox (черный ящик), в который записываются все логи работы дрона. Во всех современных полетных контроллерах черный ящик уже встроенный со своей флэш-памятью и вам не нужно будет устанавливать флэшку, как раньше.
RPM-фильтр позволяет регуляторам оборотов передавать информацию об оборотах двигателей, а это в свою очередь помогает полетному контроллеру снизить вибрацию от работы двигателей, то есть, RPM-фильтрация сглаживает вибрацию. До недавнего времени RPM-фильтрация была доступна только на blheli_32, а теперь только на BLHELI_S, на которой работают более дешевые и распространенные регуляторы оборотов.
Функция позволяет улучшить летные характеристики квадрокоптера без необходимости сложной настройки всего цикла PID.
Поддерживают ли ваши ESC и полетный контроллер RPM?
RPM-фильтрация работает только на BLHELI_S ESC и свежей версии Betaflight. Если ваши регуляторы оборотов работают не на прошивке BLHeli_S, то вы не сможете настроить эту функцию. Также, такого фильтра нет в старых полетных контроллерах, таких как F1 и F3. F4 уже все должны обладать данной функцией. Прошивка Betaflight должна быть не старее 4.1.

Обновление Betaflight
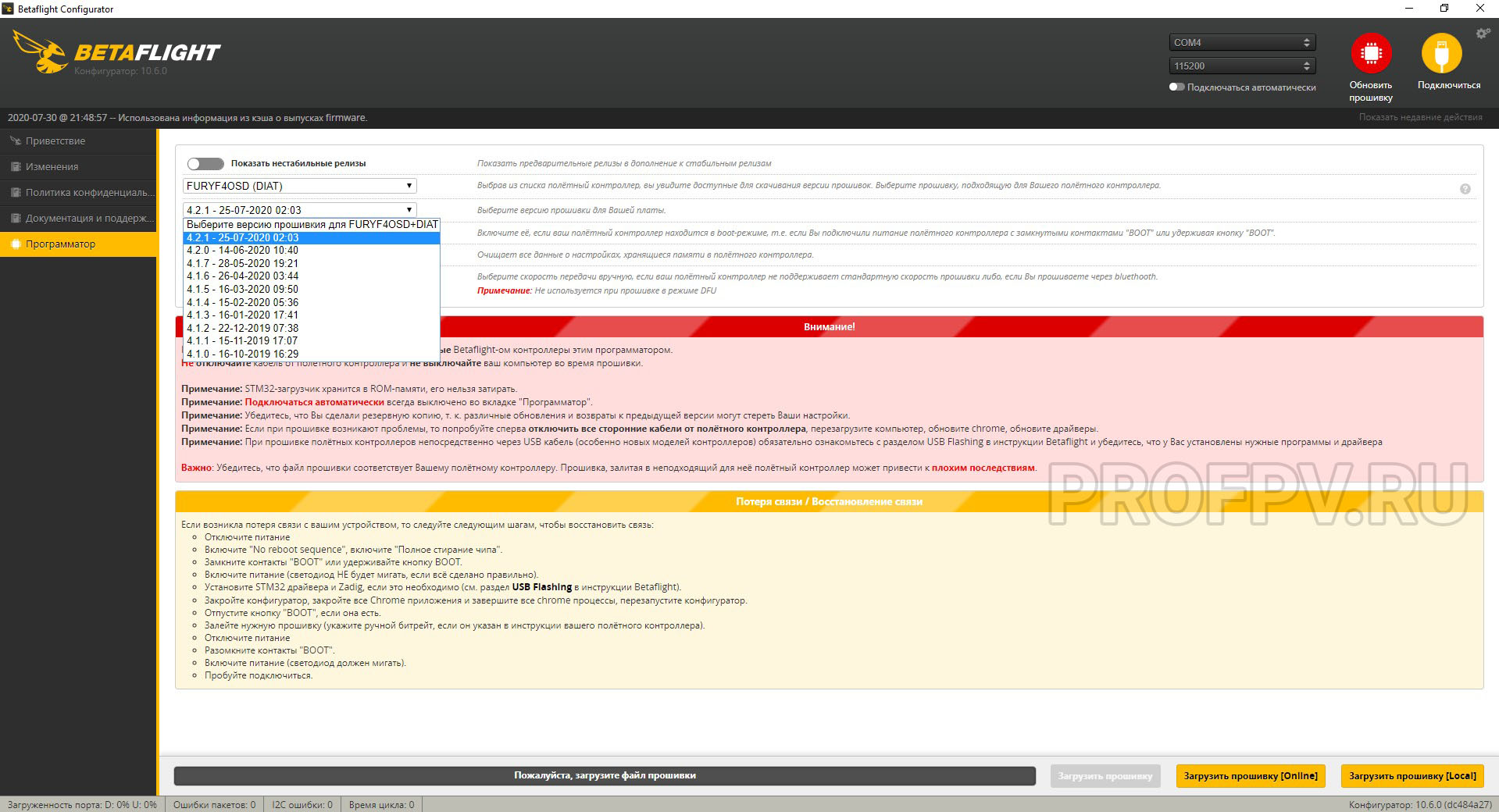
Прошивка Betaflight должна быть версии 4.1.x или выше, в противном случае, вы не сможете использовать RPM-фильтрацию, потому что ее там не будет.
Не путайте версию прошивки с версией конфигуратора.
Версию прошивки можно увидеть, если подключиться к Betaflight, она будет слева под логотипом:
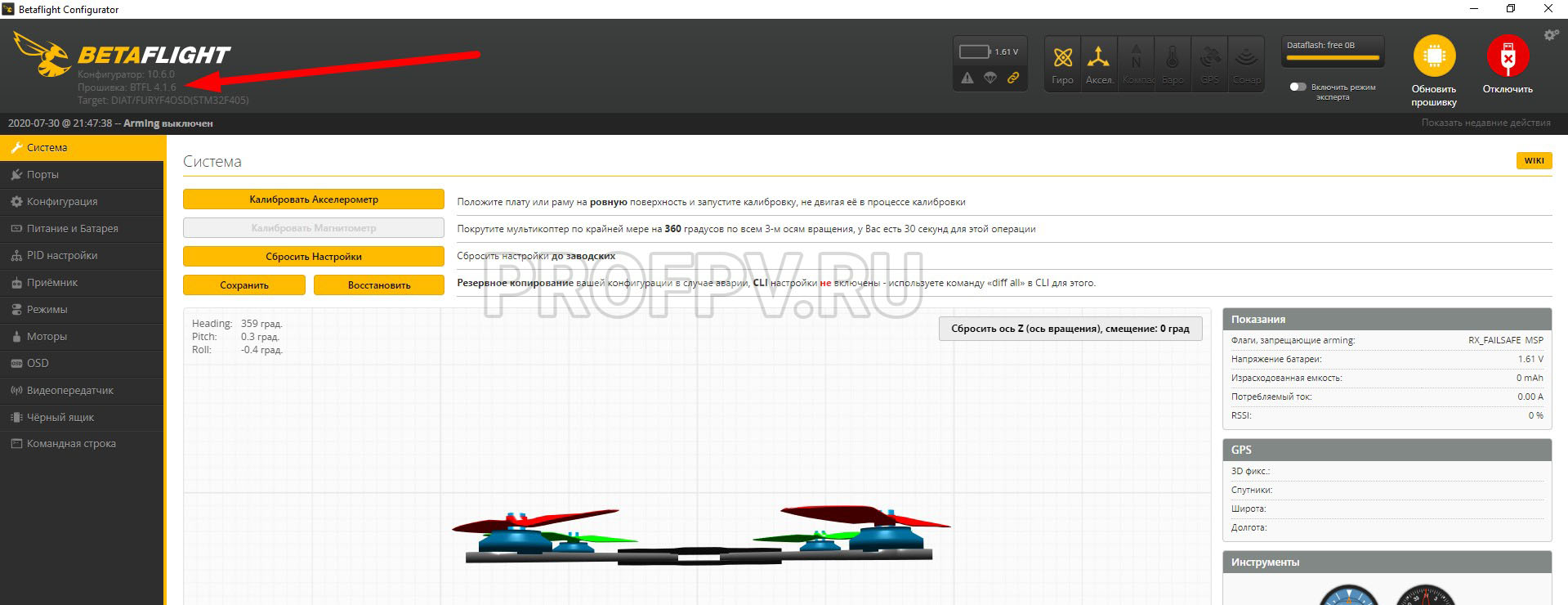
Если все хорошо и версия новая, то переходим к следующему шагу. Если нет, то вам нужно обновиться до новой версии. После прошивки надо будет заново настроить полетный контроллер.
Для того, чтобы быстро заново настроить полетный контроллер, сделайте скриншоты каждой страницы в Betaflight.
Обновление регуляторов оборотов (ESC)
Обновление происходит через конфигуратор BLHeli. Он есть как отдельной программой, так и приложением для Google Chrome. Вы можете использовать приложение для Хрома: https://chrome.google.com/webstore/detail/blheli-configurator/mejfjggmbnocnfibbibmoogocnjbcjnk?utm_source=chrome-app-launcher-info-dialog, а мы будем использовать программу: https://github.com/blheli-configurator/blheli-configurator/releases
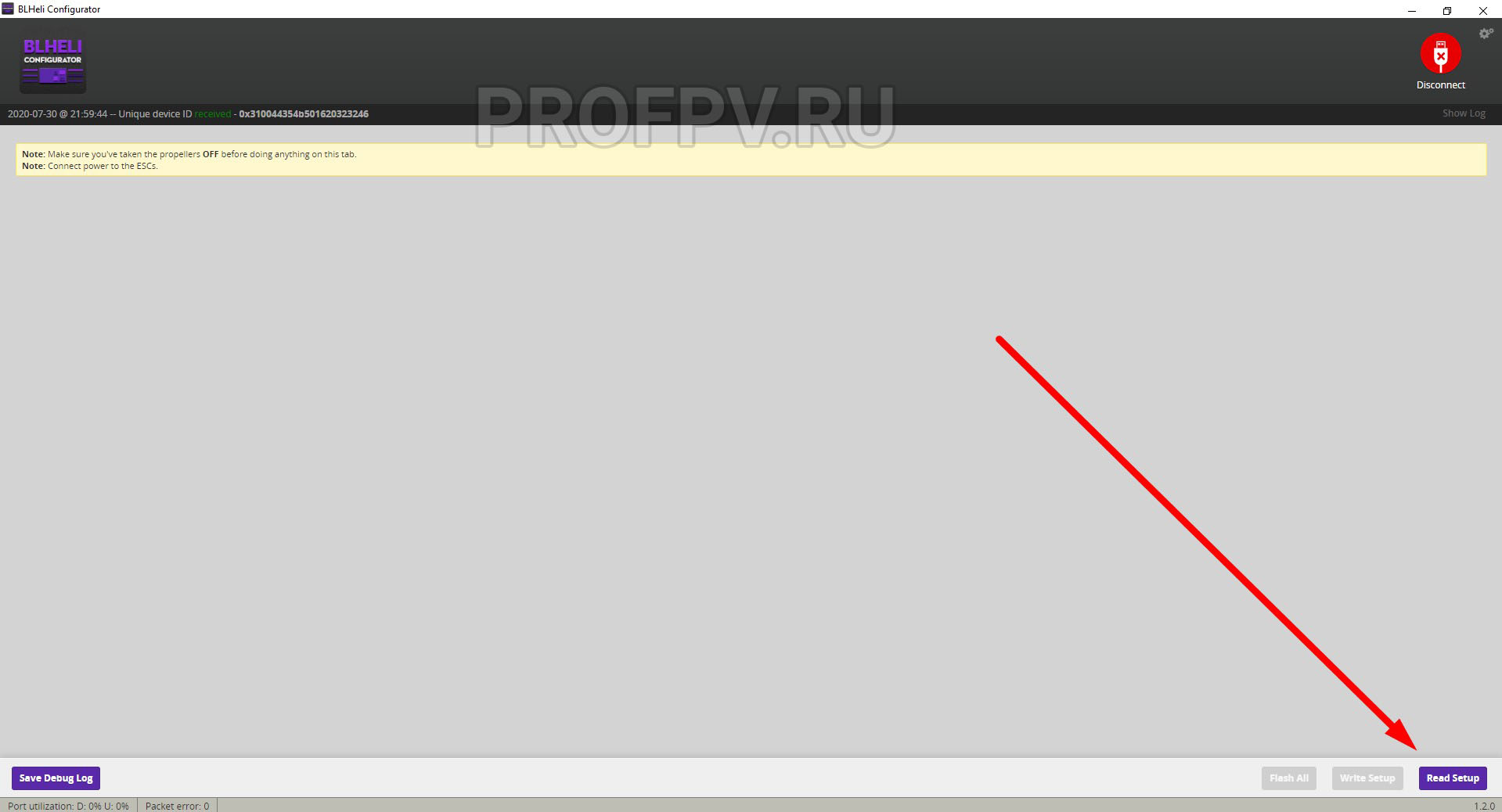
Подключаемся через компьютер к квадрокоптеру (через USB-кабель).
Не забудьте снять пропеллеры! Всегда есть вероятность, что двигатели могут заработать.
Жмем Read setup в правом нижнем углу конфигуратора:
После этого вы увидите текущие настройки и прочую информацию о ваших регуляторах оборотов. У ESC тоже есть цель (target) и это важная информация, в противном случае, вы можете сделать из ESC кирпич (мертвый кусок компонентов). Цель прошивки отображается в фиолетовой полоске в верхней части каждого блока регуляторов оборотов:
В нашем случае это C-H-40:

Далее вам нужно будет скачать файл прошивки для ваших регуляторов.
Найдите свою версию и скачайте:
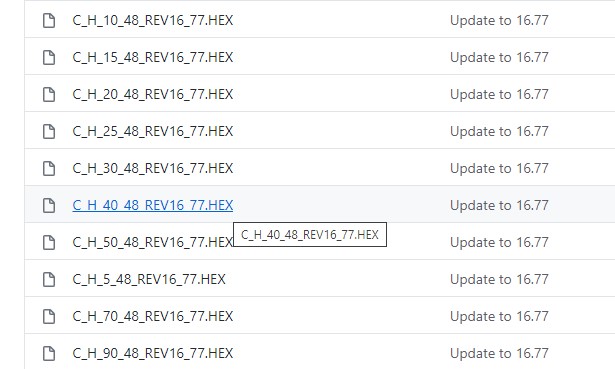
С версиями выше .77, могут быть проблемы совместимости с новыми версия Betaflight, но возможно, проблем уже нет, так что, их устанавливаете на свой страх и риск, ответственности не несем.
Жмем кнопку Flash all в нижней части конфигуратора, у вас откроется страница для выбора прошивки или загрузки файла прошивки:
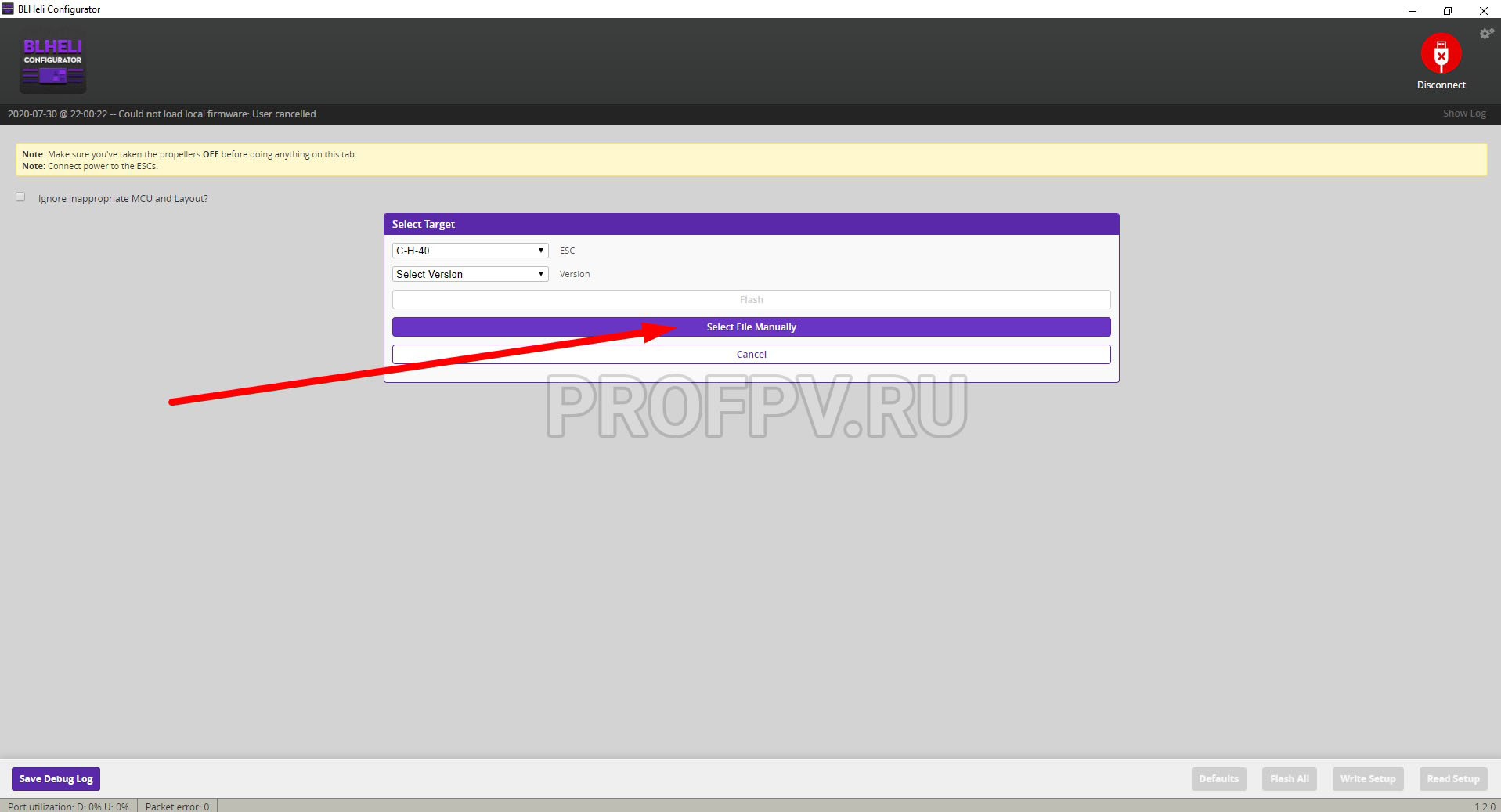
Выбираем наш скаченный ранее файл. Жмем Flash. Начнется процесс прошивки регуляторов оборотов по очереди. Ничего не отсоединяйте и не трогайте, пока программа все не сделает. Если прошивка поменяла направление вращения нескольких двигателей, вы можете сменить направление прямо здесь, в этом конфигураторе, выбрав Normal или Reverse в настройках каждого двигателя.
Настройки Betaflight
После настроек выше, вам нужно будет сделать некоторые настройки и в Betaflight.
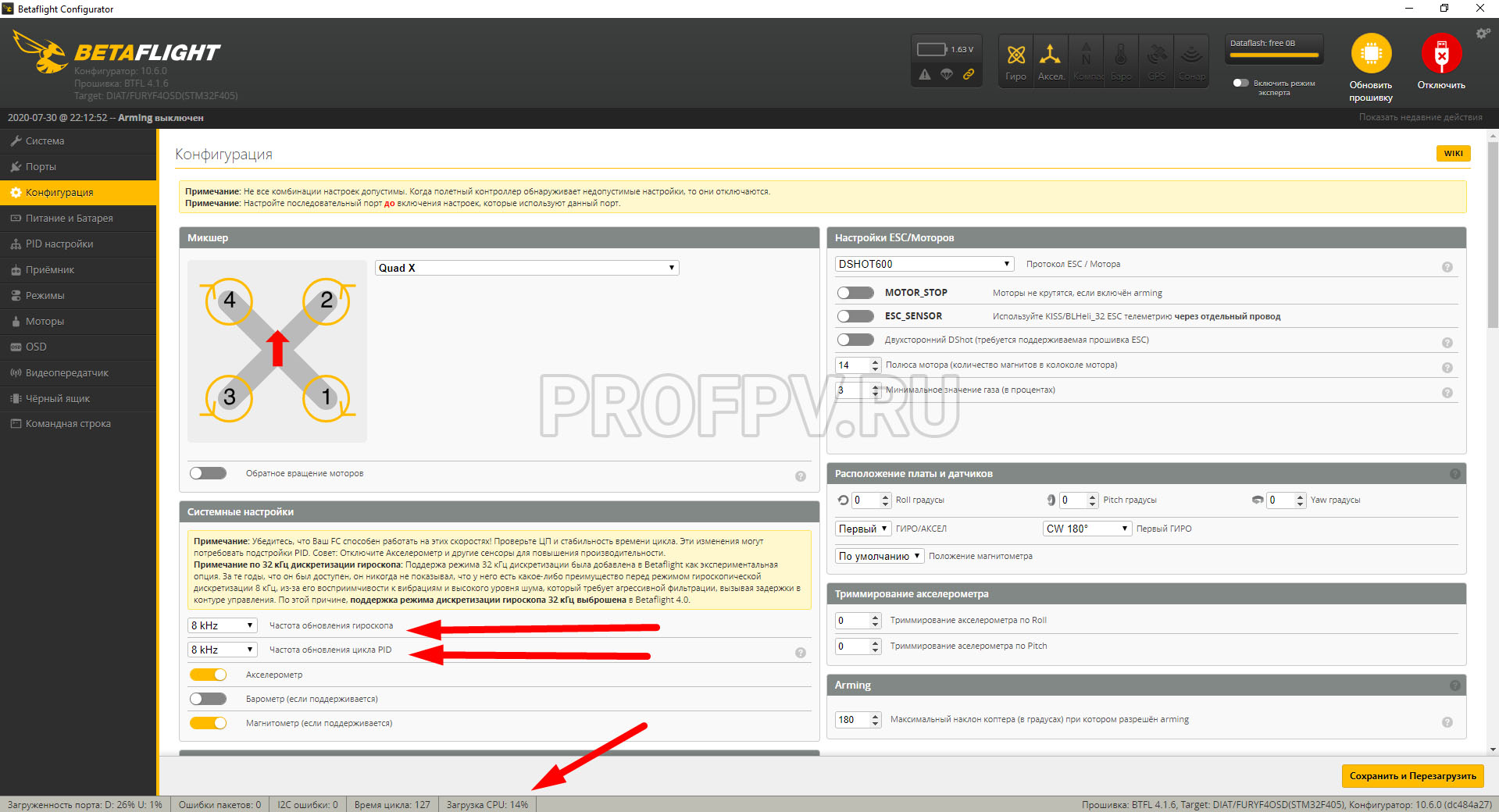
Подключитесь к Betaflight и установите частоту обновления гироскопа и PID на 4k/4k. Если процессор сильно загружается (его загрузка показывается в самом низу программы), то можно снизить частоту до 2k/2k, а если загрузка остается маленькой, то можно увеличить до 8k/8k.
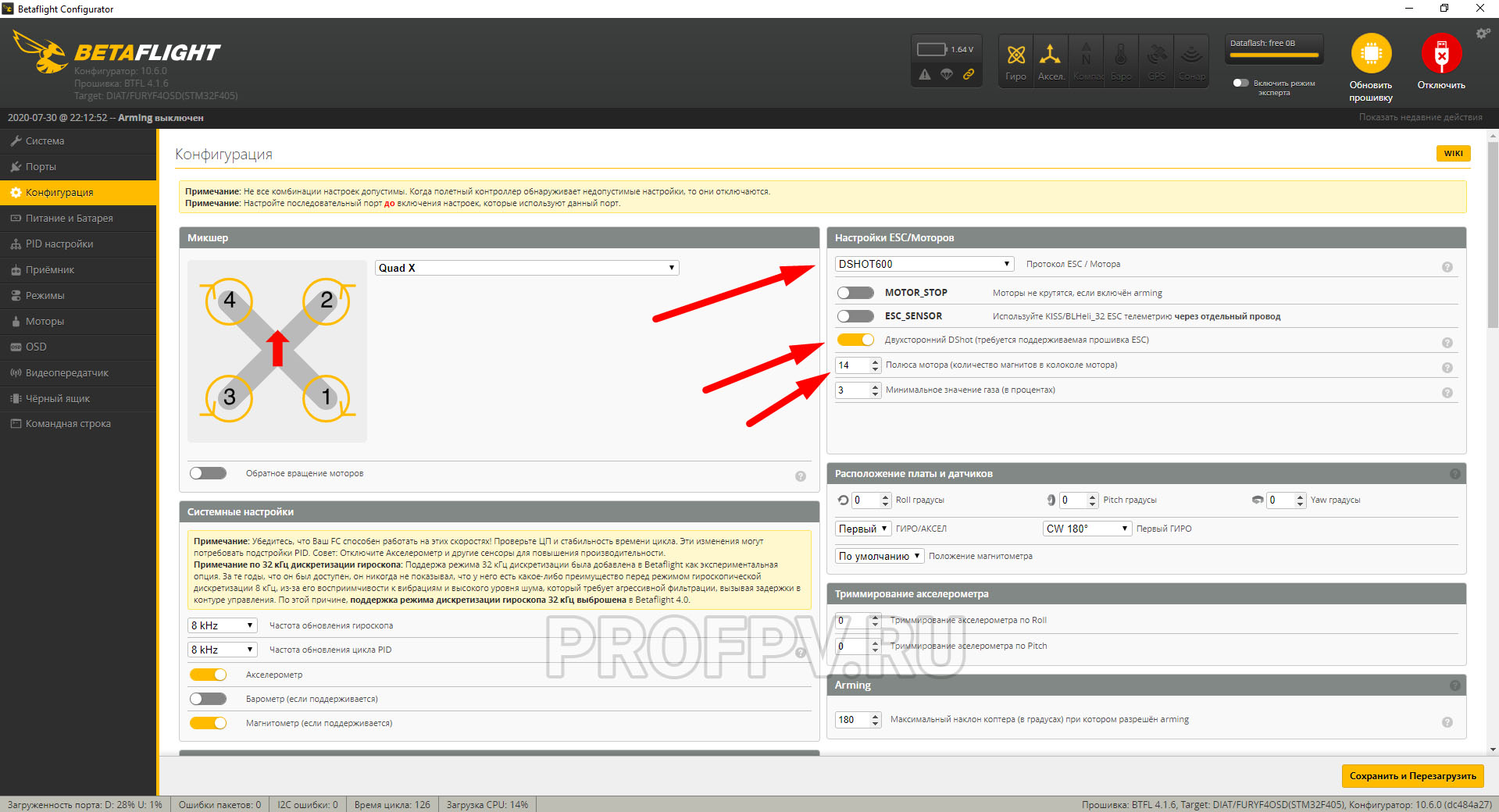
Далее нужно включить bi-directional Dshot (двунаправленный), чтобы появилась возможность фильтровать обороты двигателей.
На этом моменте вам нужно правильно указать количество полюсов на двигателях, а также установить правильный протокол.
Мы рекомендуем установить протокол DSHOT300 из-за повышенной нагрузки на процессор, но тут схема такая же, как с частотой обновления гироскопа и PID, можно увеличить или уменьшить опираясь на загрузку процессора.
По умолчанию, во всех двигателях 5-дюймовых квадрокоптеров установлено 14 полюсов, но лучше вам самостоятельно посчитать количество магнитов, установленных в колоколе двигателя.
Заключительный шаг. Перейдите на вкладку Настройки PID (PID Tuning) и далее в Настройки фильтрации (Filter Settings). Прокрутите вниз и найдите настройку для динамического фильтра notch, а затем измените ее на 0/250/90/350 для Betaflight версии 4.2.x или LOW/0/250/350 для Betaflight версии 4.1.x. Мы делаем все на версии BF 4.1.1:

Все, настройка RPM-фильтрации закончена!
Заключение
Надеемся, эта статья поможет вам улучшить летные характеристики квадрокоптера с помощью RPM-фильтрации и у вас пропадет или хотя бы уменьшится вибрация или провалы в полете.
Читайте также и другие статьи на тему PID в сборнике: Полный справочник пилота
Источник
BLHeli конфигуратор для прошивки регуляторов
В этой статье я расскажу как прошивать регуляторы в BLHeli конфигураторе, что означают его настройки и как правильно прошивать регуляторы.
 BLHeli нцжен для того, чтобы записать прошивку в мозг регуляторов, по которой он будет работать, например, какие обороты он будет включать при снятии с охраны и какие будут максимальные обороты выдавать двигатели под управлением этих регуляторов. Также там можно поставить какой-нибудь звук при включении дрона, например, там есть тема из Звездный войн, очень эпично звучит эта музыка. Также там настраивается и пищалка двигателей, не зуммер, а именно пищалка двигателями, например, после 3-5-10 минут простоя они начнут пищать, если вы это настроите. Все настройки не сложные, ниже все будет пошагово и с объяснением.
BLHeli нцжен для того, чтобы записать прошивку в мозг регуляторов, по которой он будет работать, например, какие обороты он будет включать при снятии с охраны и какие будут максимальные обороты выдавать двигатели под управлением этих регуляторов. Также там можно поставить какой-нибудь звук при включении дрона, например, там есть тема из Звездный войн, очень эпично звучит эта музыка. Также там настраивается и пищалка двигателей, не зуммер, а именно пищалка двигателями, например, после 3-5-10 минут простоя они начнут пищать, если вы это настроите. Все настройки не сложные, ниже все будет пошагово и с объяснением.
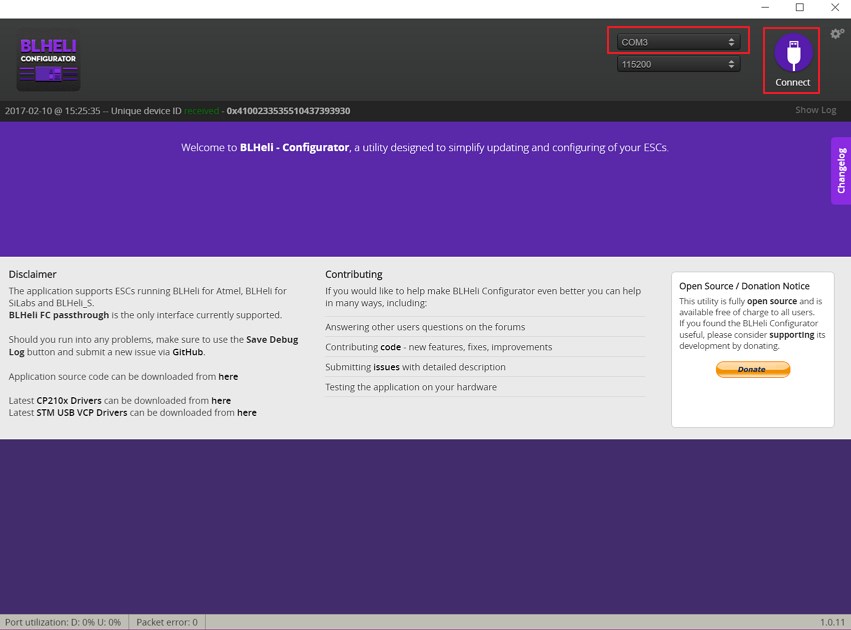
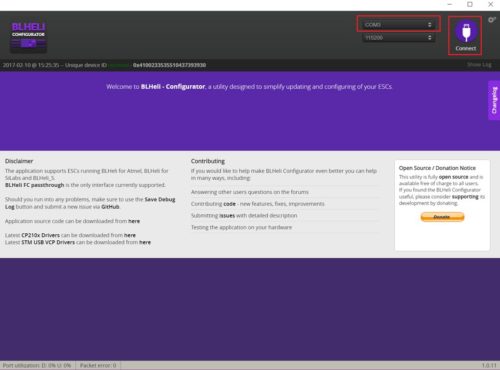
- Для начала запускаем BLHeli, выбираем нужный порт (если один не срабатывает, выбираем другой) и нажимаем Connect:

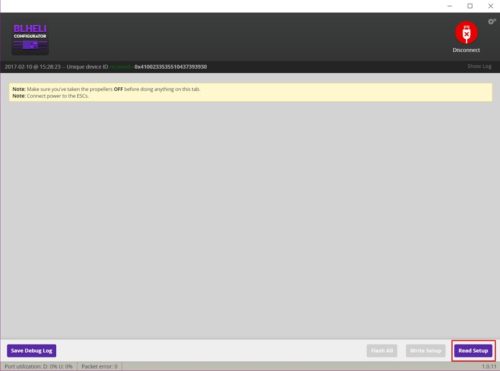
- После этого будет предупреждение о том, чтобы вы сняли пропеллеры. Это важно! Обязательно снимите пропеллеры с двигателей!
Как снимите пропеллеры, нажмите кнопку Read setup (чтение настроек): - Это главное окно настроек регуляторов. Справа вы видите блок с настройками регуляторов по отдельности, а блок слева — настройка общих настроек всех регуляторов. Внизу есть кнопки Восстановить все по умолчанию (Defaults), Прошить все (Flash all), Записать настройки (Write setup): Порядок нумерации на этом скриншоте показывает порядок прошивки регуляторов:
1) Я рекомендую всегда прошивать на последнюю версию програмного обеспечения ваших регуляторов. Нажмите кнопку Flash All (если она будет неактивна, значит у вас разные регуляторы, нажимайте FLASH FIRMWARE у каждого регулятора отдельно):
Выбираете название своих регуляторов из списка, если это не сделалось автоматически, выбираете последнюю версию и нажимаете Flash (прошить). Здесь же вы можете выбрать и свой файл прошивки, но я не рекомендую, лучше использовать то, что предлагает blheli, иначе вы рискуете превратить свой регулятор в кирпич.
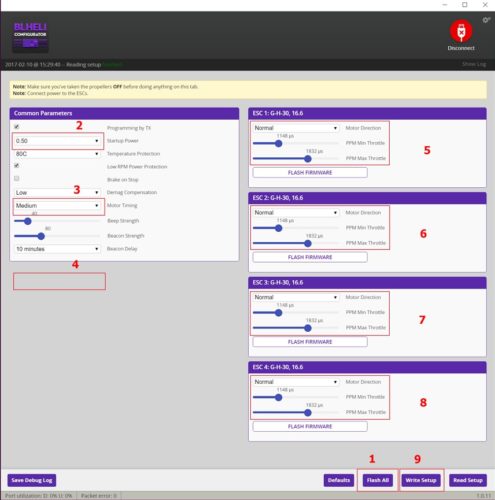 Порядок нумерации на этом скриншоте показывает порядок прошивки регуляторов:
Порядок нумерации на этом скриншоте показывает порядок прошивки регуляторов: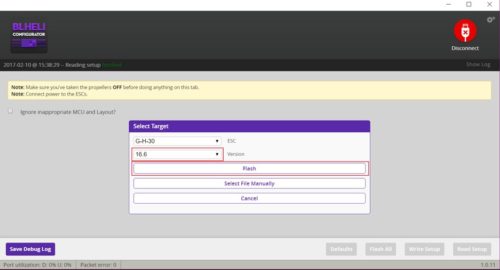
2) Startup Power — эта настройка определяет как быстро регулятор будет запускать двигатель, обычно значение меняют, когда возникают с этим проблемы. Я не рекомендую менять это значение новичкам. Значение нужно будет менять только для новейших мощных двигателей, например, как EMax RS2206S. Если все же будете менять цифры, то менять нужно с шагом 0,25 или 0,125.3) Motor Timing — определяет как быстро регуляторы будут взаимодействовать с моторами. Новичкам не рекомендую в первую настройку трогать это значение. Обычно, все мини и гоночные дроны настраивают этот параметр на Medium и иногда на Fast.
4) Если у вас стандартные регуляторы BLHeli ESC, а не BLHeli_S, то на этом месте будет еще одна настройка под названием PWM Frequency/Damped. Если у вас многороторный квадрокоптер (много двигателей, более 4), то в этой настройке ставим Damped Light.5) Здесь настраиваем направление вращения мотора и обороты на минимальном режиме работы и на максимальном:
Motor Direction — тут выбираем направление вращения двигателя. В какую сторону должен крутиться этот двигатель вы можете посмотреть на главной странице в Betaflight конфигураторе. Здесь два режима, Normal и Revers, т.е. по часовой стрелке и против.
PPM Values — количество оборотов на минимальном режиме и максимальном. Минималка бывает разной, она определяется во вкладке Motors в Betaflight, об этом поговорим позже (в общем ползунок двигателя поднимаем очень медленно до тех пор, пока двигатель не начнет потихоньку крутиться, там будет показываться значение, вот его и записываем в минималку в blheli).
6) 6, 7 и 8 тоже самое, смотрите 5 пункт.
9) Write Setup — после того, как все настроим, нажимаем эту кнопку и настройки запишутся в регуляторы.
Источник



