- Драйверы устройств в Linux
- Часть 11: Драйверы USB в Linux
- Обнаружение устройства USB в Linux
- Разбираемся в секции, описывающей устройство USB
- Регистрация драйвера USB для флеш устройства
- Подведем итог
- Добавление драйвера устройства в Linux
- Способы установки драйверов
- Ручная установка драйвера
- Использование нового драйвера
Драйверы устройств в Linux
Часть 11: Драйверы USB в Linux
Оригинал: «Device Drivers, Part 11: USB Drivers in Linux»
Автор: Anil Kumar Pugalia
Дата публикации: October 1, 2011
Перевод: Н.Ромоданов
Дата перевода: июнь 2012 г.
Эта статья, которая является частью серии статей о драйверах устройств в Linux, поможет вам начать писать ваш первый драйвер USB в системе Linux.
Флеш устройство Пагса было именно тем устройством, которым Светлана воспользовалась, когда они сели вдвоем за изучение мира драйверов USB в Linux. Самым быстрым способом с ним разобраться был обычный способ Пагса — выбрать устройство USB и написать для него драйвер для того, чтобы с ним поэкспериментировать. Поэтому они выбрали флэш устройство (т.е. USB флешку), которое было под рукой — JetFlash от Transcend, с ID поставщика 0x058f и ID продукта 0x6387 .
Обнаружение устройства USB в Linux
Независимо от того, есть ли драйвер для устройств USB в Linux системе или его нет, допустимое устройство USB всегда будет обнаруживаться в системе Linux в пространстве аппаратных средств и в пространстве ядра, поскольку система создана (и выполняет обнаружение) в соответствии со спецификациями протокола USB. Обнаружение в аппаратном пространстве осуществляется хост контроллером USB — как правило, соответствующем шинным устройством, аналогичным устройству PCI в системах x86. Соответствующий драйвер хост-контроллера обнаруживает устройство и транслирует информацию низкоуровнего физического слоя в конкретную информацию более высокого уровня протокола USB. Затем информация протокола USB, касающаяся устройства и, имеющая специальный формат, заносится в общий слой ядра USB (драйвер usbcore) в пространстве ядра, что позволяет обнаруживать устройства USB в пространстве ядра даже в том случае, когда отсутствует драйвер конкретного устройства.
Дальше — дело различных драйверов, интерфейсов и приложений (которые различны в различных дистрибутивах Linux) отображать обнаруженные устройства в пользовательском пространстве. На рис.1 показана иерархия подсистемы USB в Linux.
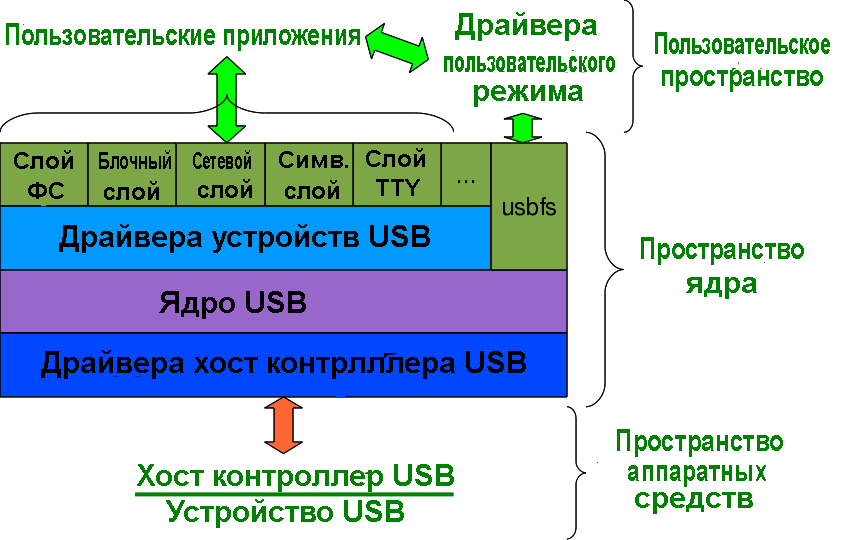
Рис.1: Подсистема USB в Linux
Краткий список всех обнаруженных устройств USB можно получить с помощью команды lsusb , которую следует запустить в роли пользователя root. На рис.2 приведен такой список как для случая с флэш устройством, так и без него. Параметр -v в команде lsusb позволяет получить более подробную информацию.
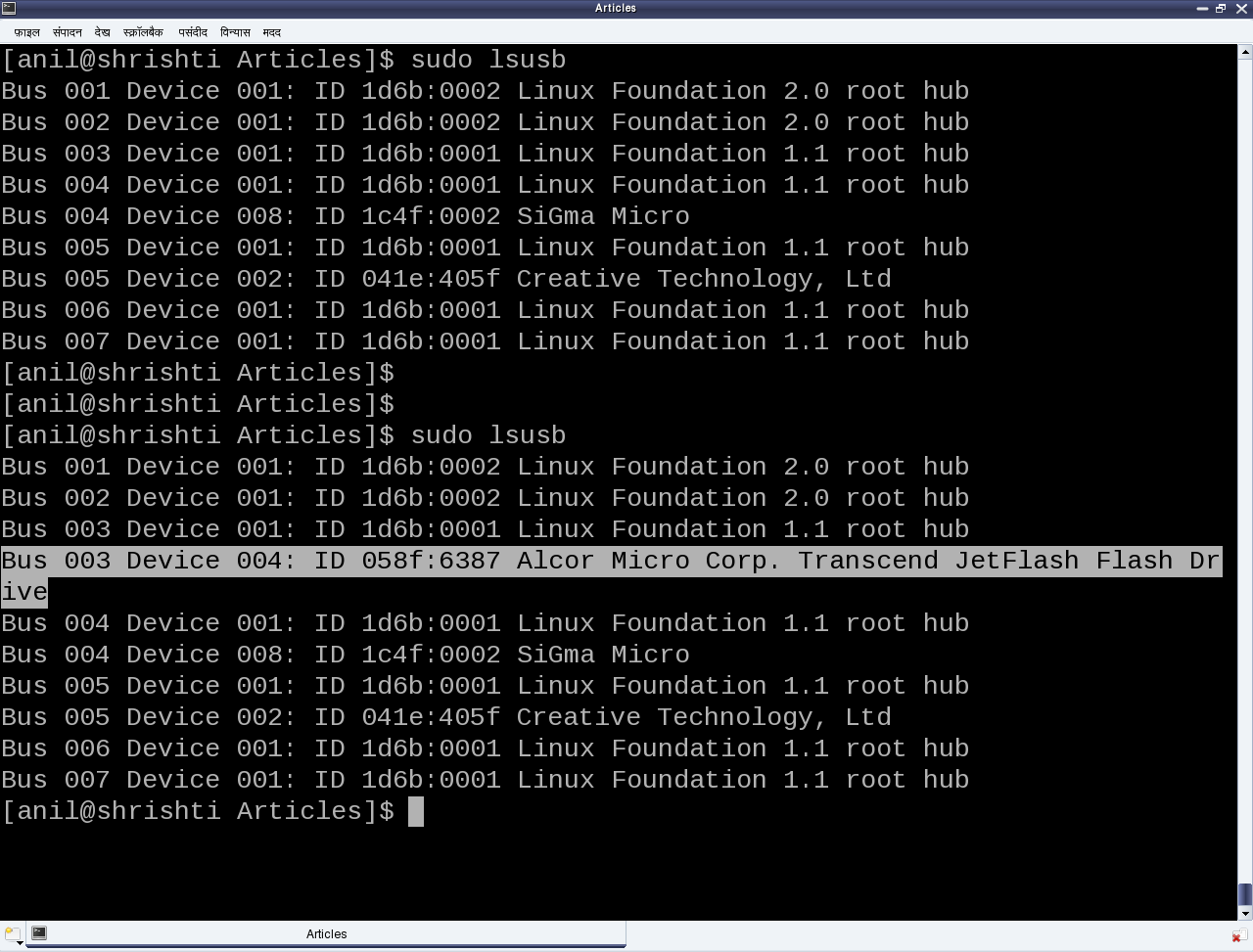
Рис.2: Информация, выдаваемая командой lsusb
Во многих дистрибутивах Linux, таких как Mandriva, Fedora, . , драйвер usbfs сконфигурирован так, что он загружается по умолчанию. В результате можно с помощью команды cat /proc/bus/usb/devices из директория /proc извлечь конкретную информации об обнаруженном USB-устройстве, представленную в удобном виде. На рис.3 показан типичный пример такой информации, которая находится в специальной секции, описывающей флэш-устройство. В списке обычно присутствует по одному такому разделу для каждого допустимого устройства USB, обнаруженного в системе.
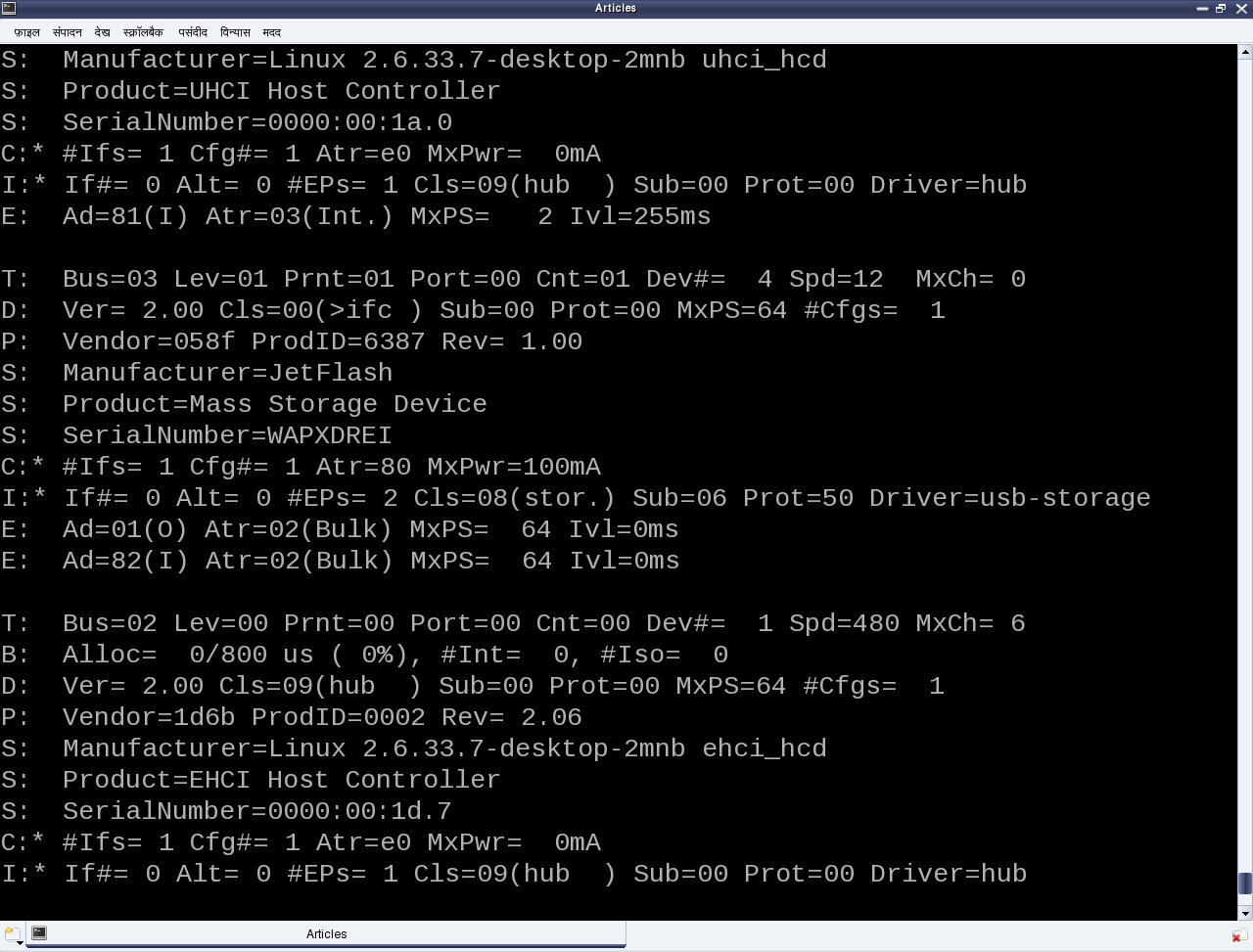
Рис.3: Фрагмент информации из proc, касающейся USB
Разбираемся в секции, описывающей устройство USB
Чтобы дальше разбираться с этими секциями, нужно в первую очередь понять, что такое допустимое устройство USB. Для всех допустимых устройств USB есть одна или несколько конфигураций. Конфигурация устройства USB похожа на профиль, причем в качестве конфигурации, используемой по умолчанию, обычно используется первая конфигурация. Таким образом, в Linux для каждого устройства по умолчанию поддерживается только одна конфигурация. Для каждой конфигурации в устройстве может быть один или несколько интерфейсов. Интерфейс соответствует функции, предоставляемой устройством.
Интерфейсов может быть столько, сколько есть функций, предоставляемых устройством. Так, скажем, устройство МФУ USB-принтер (многофункциональное устройство) может выполнять печать, сканирование и отправку факсов, и, скорее всего, для него будет, по крайней мере, три интерфейса, по одному для каждой из функций. Таким образом, в отличие от других драйверов устройств, драйвер USB устройства, как правило, связывается / пишется отдельно для каждого интерфейса, а не для устройства в целом — это значит, что для устройства USB может быть несколько драйверов устройств, причем для интерфейсов различных устройств может использоваться один и тот же драйвер, — хотя, конечно, для одного интерфейса не может быть более одного драйвера.
Вполне нормальной и достаточно обычной является ситуация, когда для всех интерфейсов устройства USB используется один и тот же драйвер USB. В записи Driver=. для директория proc (рис. 3) показано, что в драйвер отсутствует отображение интерфейса ( none ).
Для каждого интерфейса есть один или несколько источников / приемников данных. Источник / приемник данных (endpoint) похож на конвейер (pipe), используемый для передачи информации в зависимости от функции либо в интерфейс, либо из интерфейса устройства. В зависимости от типа информации, источники / приемники данных могут быть четырех типов: Control, Interrupt, Bulk и Isochronous.
Прим.пер.: Подробное описание указанных четырех типов источников / приемников данных будет приведено в следующей статье данной серии статей.
Согласно спецификациям протокола USB во всех допустимых устройствах USB должен быть неявно используемый источник / приемник данных с номером 0 (end-point zero) — единственный двунаправленный источник / приемник данных. На рис.4 приведена полная наглядная схема допустимого устройства USB, соответствующее приведенному выше объяснению.
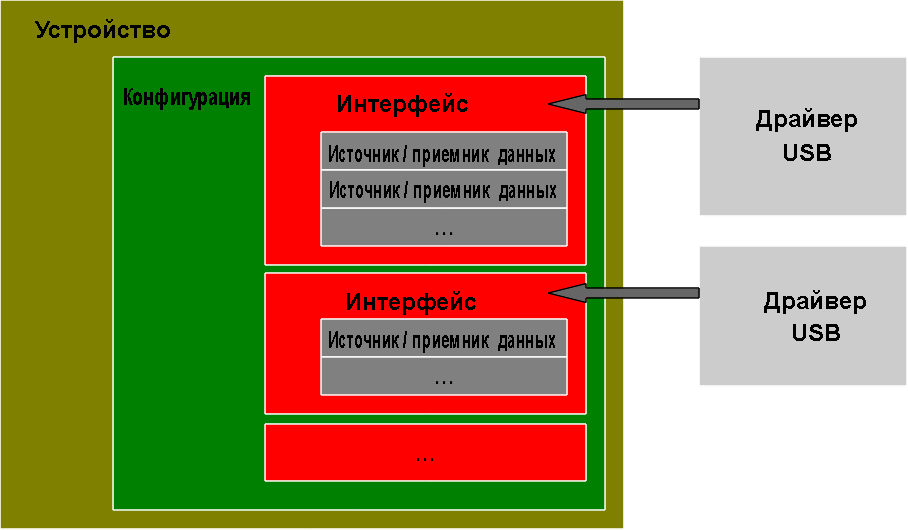
Рис.4: Общий взгляд на устройство USB
Вернемся обратно к секциям устройств USB (рис. 3) — первая буква в каждой строке соответствует различным частям спецификации устройства USB. Например, D — устройству, C — конфигурации, I — интерфейсу, E — источнику / приемнику данных (endpoint) и т.д. Подробнее об этом и о многом другом смотрите в исходном коде ядра в файле Documentation/usb/proc_usb_info.txt .
Регистрация драйвера USB для флеш устройства
«Похоже, для того, чтобы можно было самостоятельно написать первый драйвер USB, потребуется узнать много всего о протоколе USB, — конфигурацию устройства, интерфейсы, конвейеры передачи данных, четыре типа передачи данных, а также многие другие обозначения, например, T, B, S, …, которые есть в спецификации устройств USB» — вздохнула Светлана.
«Да, но ты не беспокойся — со всем этим можно будет разобраться подробнее позже. Давай со всем этим разбираться последовательно — возьмем интерфейс флеш устройства, связанного с драйвером нашего USB-устройства ( pen_register.ko )» — утешил Пагс.
Как и в любом другом Linux-драйвере, здесь также требуется конструктор и деструктор — используется тот же самый шаблон драйвера, который использовался для всех драйверов. Но содержимое будет другим, поскольку это драйвер слоя аппаратного протокола, т.е. горизонтальный драйвер в отличие от символьного драйвера, который был одним из вертикальных драйверов, рассмотренных ранее. Разница лишь в том, что вместо регистрации и отмены регистрации в VFS, здесь это должно выполняться на уровне соответствующего протокола — в данном случае — в ядре USB; вместо того, чтобы предоставлять интерфейс пользовательского пространства, например, файл устройства, он должен подключиться к реальному устройству в пространстве аппаратных средств.
Интерфейсы API для ядра USB выглядят следующим образом (прототип в
):
В структуре usb_driver в соответствующих полях должны быть указаны имя устройства, идентификационная таблица, используемая для автообнаружения конкретного устройства, и две функции обратного вызова, которые вызываются ядром USB при горячем подключении и отключении устройства, соответственно.
Собираем все вместе в файл pen_register.c , который будет выглядеть следующим образом:
Затем можно повторить обычные шаги, выполняемые для любого Linux драйвера:
- Собираем драйвер (файл .ko ) с помощью запуска команды make .
- Загружаем драйвер с помощью команды insmod .
- Выдаем список загруженных модулей с помощью команды lsmod .
- Выгружаем драйвер с помощью команды rmmod .
Но, что удивительно, результат не будет таким, как ожидалось. Используйте команду dmesg и загляните в директорий proc для просмотра различных журналов и прочих подробностей. Это связано не с тем, что драйвер USB отличается от символьного драйвера, — здесь есть одна проблема. На рис.3 показано, что у флэш-устройства есть один интерфейс (с номером 0), который уже связан с обычным драйвером usb-storage.
Теперь, для того, чтобы связать наш драйвер с этим интерфейсом, нам нужно выгрузить драйвер usb-storage (т. е. выполнить команду rmmod usb-storage ) и переподключить флэш-накопитель. Как только это будет сделано, результаты станут такими, как ожидалось. На рис.5 показан фрагмент информации из журналов и из директория proc . Снова подключите и отключите (в горячем режиме) флеш устройство и пронаблюдайте, как действуют вызовы probe и disconnect.
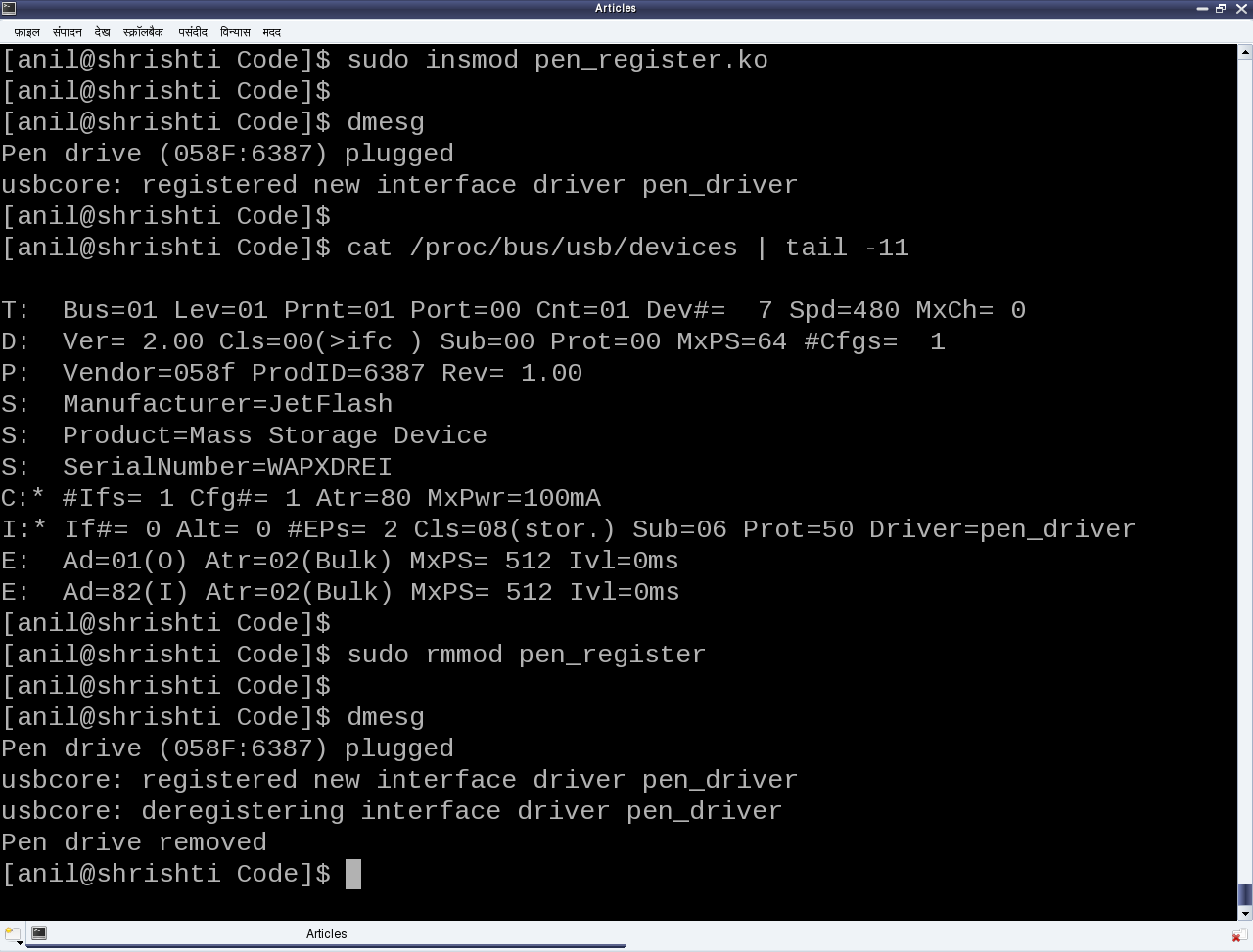
Рис.5: Флеш устройство в действии
Подведем итог
«Наконец-то! Что-то действует!» — облегченно сказала Светлана. «Но мне кажется, что для того, чтобы собрать полный драйвер устройства USB, здесь есть еще много того, с чем следует разбираться (например, с идентификационной таблицей, обратными вызовами probe и disconnect и т. д.)».
«Да, ты права. Давай разбираться со всем по порядку и с перерывами » — ответил Пагс, прервав самого себя.
Источник
Добавление драйвера устройства в Linux
Обычно в системах Unix и Linux установка драйверов для новых устройств не вызывает трудностей. Даже для неопытных пользователей этих систем. Но это в том случае, если производители устройства (и/или разработчики драйверов) позаботились об этом. И оснастили пакет драйвера специальными установочными и конфигурационными скриптами. А также протестировали всё это в нескольких системах. Однако бывают случаи, когда «удобной» возможности установить драйвер устройства нет, но есть исходные коды драйвера. В таком случае можно попытаться собрать драйвер самостоятельно. Конечно, это далеко не так просто, нужно поэкспериментировать. Но успешный результат возможен с высокой вероятностью. И главное, что для этого требуется — это знать и понимать общий порядок действий в случае ручной сборки драйвера. С такими задачами часто сталкиваются администраторы систем, обслуживающих технологические процессы на производствах, хостинг-площадки и т. д.
Способы установки драйверов
Для Linux-систем установка драйверов устройств происходит тремя основными способами:
- установка патча для определённых версий ядра;
- использование специальных сценариев для установки и конфигурации драйвера;
- с помощью загружаемого модуля ядра.
Надо признать, что для Linux ручная установка драйверов представляет собой довольно сложную и трудоёмкую работу. Поэтому разработчики стремятся всё чаще обеспечивать автоматическую установку и настройку для своих драйверов/устройств. Ведь они заинтересованы в максимально эффективном распространении своих разработок. По этой причине самым распространённым способом установки драйверов является использование сценариев установки. Для самых популярных типов устройств, например для видеокарт, аудиоустройств и даже для сетевого оборудования в настоящее время трудно найти драйверы без автоматической установки.Установка таких драйверов ничем не отличается от установки обычных пакетов. Вся инструкция описана в файле README, подробнее об установке из исходников читайте здесь.
Но есть оборудование (всевозможные адаптеры, преобразователи интерфейсов) и ситуации, для которых есть только исходные коды драйвера (часто не официальные) и необходимость интеграции его с ядром.
Если в качестве драйвера используются патчи ядра, то установить их (собственно и сам драйвер) можно выполнив следующие команды:
Расположение «каталог_исходных_кодов_ядра» зависит от системы, в CentOS это /usr/lib/modules/ /kernel, Например
В случае с ручной установкой, необходимо для начала интегрировать драйвер некоего устройства (исходные коды) в дерево каталогов исходных кодов ядра.
Ручная установка драйвера
Для примера, пусть требуется добавить в ядро драйвер некоего сетевого устройства netdevice. Драйвер этого устройства нужно (как уже известно) поместить в один из каталогов с исходными кодами ядра. А именно — в каталог drivers, внутри которого может быть следующее содержимое:

Драйверы чаще всего помещаются в подкаталоги scsi, char, block, net, а также sound и usb. Эти подкаталоги отражают схему размещения драйверов в зависимости от их типа: блочные — для дисков IDE, символьные — для последовательных портов например, для сетевых устройств, звуковых плат и USB-устройств — USB-адаптеры, USB-модемы и т. д. Другие подкаталоги служат для размещения драйверов других категорий, в частности для системных и разного рода шин (pci, pcie, nubus, zorro), а также для платформенно-зависимых драйверов — acorn, macintosh.
Таким образом, драйверы для сетевого устройства netdevice следует поместить в следующий каталог:
Исходные коды драйвера представляют собой набор файлов *.c, *.cpp и *.h, которые могут быть объединены в дерево каталогов, в зависимости от того, как составлен проект «исходников» драйвера.
Теперь необходимо включить исходные коды драйвера netdevice в процесс компиляции ядра. Для этого нужно отредактировать следующие файлы:
- /drivers/net/Makefile – для сборки самого драйвера;
- /drivers/net/Kconfig – для того, чтобы имя нового устройства было доступно для конфигурирования.
Файлы Makefile и Kconfig содержатся в каждом каталоге дерева каталогов с исходными кодами ядра Linux. Это необходимо для организации универсальной разработки и расширения функционала и возможностей ядра при его сборке из исходных кодов путём независимого дополнения новым кодом. В данном случае кодом драйвера для устройства netdevice.
В файл Makefile следует добавить следующий код:
Таким образом, при сборке ядра в его составе будет собран и сам драйвер netdevice. После дополнения файла Kconfig следующим кодом:
устройство netdevice будет доступно для использования конфигурационным макросом (необходимо на этапе конфигурирования сборки ядра). Здесь команда config использует ключевое слово NETDEVICE_DEV, которое обязательно должно совпадать с фразой, следующей после CONFIG, которое ранее было указано в файле Makefile.
Команда tristate указывает, что драйвер может быть собран как загружаемый модуль, если это поддерживается. Если нет, то вместо tristate следует указать bool – драйвер будет частью ядра. Фраза ‘Netdevice support’ будет отображаться в выводе конфигурационного скрипта на этапе конфигурирования сборки ядра. Это может быть любой текст, идентифицирующий устройство, для которого добавляется драйвер.
Использование нового драйвера
В современных версиях ядра Linux задействование новых драйверов существенно упрощено. В отличие версий, выпущенных раньше 2.6. Тогда это было настоящей головоломкой и требовало знаний в программировании. Но архитектурные изменения в модели драйверов и устройств, пришедшие в версии 2.6 позволяют теперь связывать драйверы с ядром на более высоком «общепользовательском» уровне. Для этого используется специальный конфигурационный макрос MODULE_DEVICE_TABLE. Он создаёт соответствия, которые позволяют утилите modprobe (и ей подобным) задействовать новые драйверы ядра.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Источник



