- Самые полезные настройки и команды Linux
- Установка драйверов
- Установка
- Загрузка драйверов
- Конфигурирование драйверов
- Скрипты
- Добавление драйвера устройства в Linux
- Способы установки драйверов
- Ручная установка драйвера
- Использование нового драйвера
- 6 шагов загрузки Linux на пальцах
- 1. BIOS
- 2. MBR
- 3. GRUB
- 4. Ядро или Kernel
- 5. Init
- 6. Уровень выполнения программ (Runlevel)
- Дополнения, исправления, уточнения
Самые полезные настройки и команды Linux
Автор: Igor Ljubuncic, перевод: С.Русинов
Установка драйверов
Драйверы — это программы подобные обычному программному обеспечению. Разница лишь в том, что для их работы не требуется постоянное вмешательство пользователя. Они служат для взаимодействия ваших аппаратных средств между собой. Как все просто. Вам необходимо улучшить их использование операционной системой.
Чаще всего, необходимые драйвера включаются в дистрибутив и устанавливаются в процессе установки. Иногда бывает все не так удачно, и только что собранная рабочая станция будет идти без звука, сети или видео драйверов.
Я не буду вдаваться в детали, поясняя установку специфических драйверов. Для получения этой информации вам необходимо обратиться к поставщикам оборудования. Я поясню, как установить драйверы, как загрузить их, а затем как добавить их в автозагрузку, чтобы они загружались автоматически каждый раз при запуске системы.
Установка
Подобно любому программному обеспечению, драйверы могут быть скомпилированными или нет. Обычно они не скомпилированы. Драйверы обычно распространяются в виде исходных текстов, с целью достижения максимально возможной совместимости аппаратных средств на установленной платформе. Это значит, что вам придется компилировать их из исходных текстов. Элементарно! Мы уже знаем как это сделать.
Если поставщик оборудования является щедрым, он, возможно, дополнит поставляемый драйвер само-устанавливающим скриптом. Другими словами, вам будет нужно только запустить одну команду, которая выполнит: распаковку архива, компиляцию, установку и загрузку драйвера. Но это может не работать. Я был свидетелем как само-устанавливающийся скрипт драйвера работал неверно. По этой причине, для всех практических задач, вам следует устанавливать драйвер вручную.
После успешной распаковки из архива и компиляции исходников (./configure, make, make install), вы, скорее всего, столкнетесь с выбором из трех вариантов:
- Драйвер будет полностью сконфигурирован и скопирован в папки, выбранные по умолчанию, и системные пути будут обновлены. В этом случае, вам не нужно ничего делать, чтобы использовать драйвер.
- Драйвер будет сконфигурирован автоматически, и системные пути будут обновлены. Это значит, что вы только добавите имя драйвера в список загружаемых драйверов начальной загрузки, чтобы он загружался автоматически при запуске системы.
- Драйвер будет готов к использованию, но не будет сконфигурирован, системные пути не будут обновлены. Вам придется вручную загрузить драйвер и затем обновить список загружаемых драйверов начальной загрузки, чтобы он загружался автоматически при запуске системы.
При втором варианте, процесс установки, будет выглядеть следующим образом:
Теперь только остается добавить этот драйвер в список загружаемых драйверов при запуске системы. В Linux драйвера часто называют модулями .
Вам нужно открыть конфигурационный файл, содержащий список модулей. Также необходимо знать его точное имя и размещение файла в вашем дистрибутиве. В Ubuntu этот файл называется modules.conf и размещается в /etc каталоге ( /etc/modules.conf ). Мы обновим этот файл, но вначале мы сделаем его резервную копию. Пожалуйста помните, что для изменения конфигурационных файлов нужны права суперпользователя.
Так будет выглядеть эта процедура:
Приведенные выше команды откроют файл modules.conf в текстовом редакторе gedit. Теперь, просто добавьте драйвер в пустую строку ниже существующих драйверов, сохраните файл, выйдите из текстового редактора и перезагрузите систему, чтобы изменения вступили в силу. Это все!
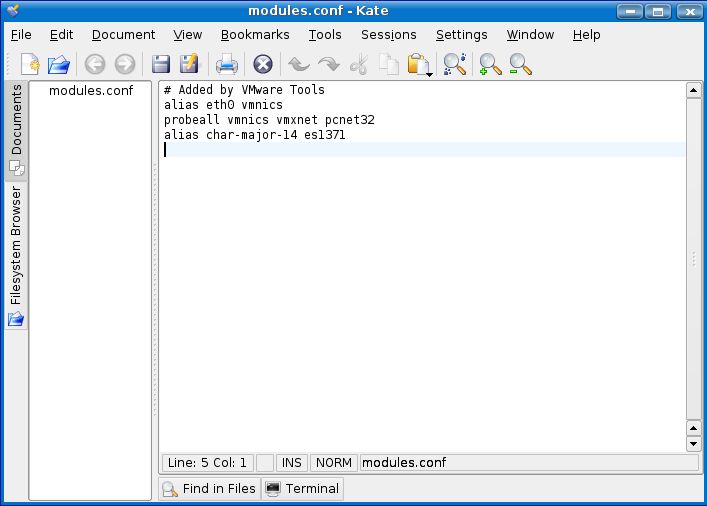
Вот пример, файла modules.conf для Kubuntu Linux, установленной на виртуальной машине. Добавим новый драйвер. Мы просто запишем его имя ниже существующих записей. Конечно, необходимо знать ТОЧНОЕ имя соответствующего драйвера.
Третий вариант немного более сложный.
Загрузка драйверов
Вы успешно скомпилировали драйвер, но ничего не произошло. Это получилось потому, что драйвер еще не включен. Посмотрев внутрь каталога, вы заметите файл с расширением .ko . Это и есть ваш драйвер, и его необходимо загрузить вручную.
Нам нужно установить драйвер в ядро. Это можно сделать с помощью команды insmod .
После загрузки драйвера его можно конфигурировать. Вы можете убедиться в том, что драйвер действительно присутствует в списке всех доступных модулей:
Если вы случайно сделали серьезную ошибку и хотите удалить драйвер, то можете воспользоваться командой rmmod :
Конфигурирование драйверов
Конфигурирование драйвера требует немного знаний о его функциональности. Чаще всего инструкции находятся в текстовых файлах how-to руководства.
Ниже приведенный пример показывает как конфигурировать сетевую карту после загрузки сетевого драйвера. Сетевой карте присвоен идентификатор и IP адрес. В данном случае, eth0 — имя выбранного устройства, но оно может быть другим, например: eth1, eth2 и т. д. . Назначенный IP адрес показывает нам, что машина будет частью локальной сети.
После перезагрузки вы увидите, что сетевое подключение отсутствует. Это происходит из-за того, что драйвер отсутствует в общем каталоге по умолчанию, и система не знает, где его искать. Вам придется повторить всю процедуру снова:
Теперь становится понятно, что применение скрипта для автоматизации этих действий было бы отличной идеей. И это именно то, что мы собираемся сделать — написать скрипт и добавить его в начальную загрузку системы.
Скрипты
Как и в системах DOS и Windows, скрипты могут быть написаны в текстовом редакторе. Учитывая внутренние различия между текстовыми файлами и скриптами, необходимо различать текстовые файлы и скрипты. В системе Windows достаточно изменить расширение .txt на .bat и файл станет скриптом. В Linux немного по-другому.
Командная строка Linux находится внутри оболочки или, точнее сказать, и есть сама оболочка или Шелл (Shell). Существует несколько оболочек, каждая со своим уникальным набором команд. Самая популярная (устанавливается по умолчанию) оболочка Linux это BASH . Нам необходимо добавить информацию в наш скрипт, если хотим сделать его связанным с нашей оболочкой.
Таким образом, записав в файл приведенные выше команды плюс ссылка на оболочку, получим следующий скрипт:
Можно сделать это короче:
Теперь у нас есть рабочий скрипт. Или точнее текстовый файл, который содержит соответствующие команды. Нам необходимо сделать его исполняемым файлом. Во-первых, нужно сохранить этот файл. Назовем его network_script .
Сделаем скрипт исполняемым.
Теперь у нас есть работающий скрипт. Нам нужно разместить его в каталоге /etc/init.d и он будет запускаться во время начальной загрузки системы.
В завершение нужно обновить систему для активации скрипта.
После перезагрузки вы поймете, что драйвер загружен автоматически и сетевая карта сконфигурирована! Возможен и другой вариант, make install и драйвер будет помещен в каталог по умолчанию:
Или вы могли разместить драйвер в этом каталоге сами. Таким образом, вы могли бы избежать написания скрипта.
Однако мой метод, даже если и менее изящный, имеет одно преимущество. Драйверы, которые вы скомпилировали вручную и поместили в каталоги по умолчанию, будут потеряны при обновлении ядра системы. Это значит, что вам будет необходимо их переустанавливать каждый раз после такого обновления. Мой неэлегантный метод позволяет избежать этой проблемы.
Источник
Добавление драйвера устройства в Linux
Обычно в системах Unix и Linux установка драйверов для новых устройств не вызывает трудностей. Даже для неопытных пользователей этих систем. Но это в том случае, если производители устройства (и/или разработчики драйверов) позаботились об этом. И оснастили пакет драйвера специальными установочными и конфигурационными скриптами. А также протестировали всё это в нескольких системах. Однако бывают случаи, когда «удобной» возможности установить драйвер устройства нет, но есть исходные коды драйвера. В таком случае можно попытаться собрать драйвер самостоятельно. Конечно, это далеко не так просто, нужно поэкспериментировать. Но успешный результат возможен с высокой вероятностью. И главное, что для этого требуется — это знать и понимать общий порядок действий в случае ручной сборки драйвера. С такими задачами часто сталкиваются администраторы систем, обслуживающих технологические процессы на производствах, хостинг-площадки и т. д.
Способы установки драйверов
Для Linux-систем установка драйверов устройств происходит тремя основными способами:
- установка патча для определённых версий ядра;
- использование специальных сценариев для установки и конфигурации драйвера;
- с помощью загружаемого модуля ядра.
Надо признать, что для Linux ручная установка драйверов представляет собой довольно сложную и трудоёмкую работу. Поэтому разработчики стремятся всё чаще обеспечивать автоматическую установку и настройку для своих драйверов/устройств. Ведь они заинтересованы в максимально эффективном распространении своих разработок. По этой причине самым распространённым способом установки драйверов является использование сценариев установки. Для самых популярных типов устройств, например для видеокарт, аудиоустройств и даже для сетевого оборудования в настоящее время трудно найти драйверы без автоматической установки.Установка таких драйверов ничем не отличается от установки обычных пакетов. Вся инструкция описана в файле README, подробнее об установке из исходников читайте здесь.
Но есть оборудование (всевозможные адаптеры, преобразователи интерфейсов) и ситуации, для которых есть только исходные коды драйвера (часто не официальные) и необходимость интеграции его с ядром.
Если в качестве драйвера используются патчи ядра, то установить их (собственно и сам драйвер) можно выполнив следующие команды:
Расположение «каталог_исходных_кодов_ядра» зависит от системы, в CentOS это /usr/lib/modules/ /kernel, Например
В случае с ручной установкой, необходимо для начала интегрировать драйвер некоего устройства (исходные коды) в дерево каталогов исходных кодов ядра.
Ручная установка драйвера
Для примера, пусть требуется добавить в ядро драйвер некоего сетевого устройства netdevice. Драйвер этого устройства нужно (как уже известно) поместить в один из каталогов с исходными кодами ядра. А именно — в каталог drivers, внутри которого может быть следующее содержимое:

Драйверы чаще всего помещаются в подкаталоги scsi, char, block, net, а также sound и usb. Эти подкаталоги отражают схему размещения драйверов в зависимости от их типа: блочные — для дисков IDE, символьные — для последовательных портов например, для сетевых устройств, звуковых плат и USB-устройств — USB-адаптеры, USB-модемы и т. д. Другие подкаталоги служат для размещения драйверов других категорий, в частности для системных и разного рода шин (pci, pcie, nubus, zorro), а также для платформенно-зависимых драйверов — acorn, macintosh.
Таким образом, драйверы для сетевого устройства netdevice следует поместить в следующий каталог:
Исходные коды драйвера представляют собой набор файлов *.c, *.cpp и *.h, которые могут быть объединены в дерево каталогов, в зависимости от того, как составлен проект «исходников» драйвера.
Теперь необходимо включить исходные коды драйвера netdevice в процесс компиляции ядра. Для этого нужно отредактировать следующие файлы:
- /drivers/net/Makefile – для сборки самого драйвера;
- /drivers/net/Kconfig – для того, чтобы имя нового устройства было доступно для конфигурирования.
Файлы Makefile и Kconfig содержатся в каждом каталоге дерева каталогов с исходными кодами ядра Linux. Это необходимо для организации универсальной разработки и расширения функционала и возможностей ядра при его сборке из исходных кодов путём независимого дополнения новым кодом. В данном случае кодом драйвера для устройства netdevice.
В файл Makefile следует добавить следующий код:
Таким образом, при сборке ядра в его составе будет собран и сам драйвер netdevice. После дополнения файла Kconfig следующим кодом:
устройство netdevice будет доступно для использования конфигурационным макросом (необходимо на этапе конфигурирования сборки ядра). Здесь команда config использует ключевое слово NETDEVICE_DEV, которое обязательно должно совпадать с фразой, следующей после CONFIG, которое ранее было указано в файле Makefile.
Команда tristate указывает, что драйвер может быть собран как загружаемый модуль, если это поддерживается. Если нет, то вместо tristate следует указать bool – драйвер будет частью ядра. Фраза ‘Netdevice support’ будет отображаться в выводе конфигурационного скрипта на этапе конфигурирования сборки ядра. Это может быть любой текст, идентифицирующий устройство, для которого добавляется драйвер.
Использование нового драйвера
В современных версиях ядра Linux задействование новых драйверов существенно упрощено. В отличие версий, выпущенных раньше 2.6. Тогда это было настоящей головоломкой и требовало знаний в программировании. Но архитектурные изменения в модели драйверов и устройств, пришедшие в версии 2.6 позволяют теперь связывать драйверы с ядром на более высоком «общепользовательском» уровне. Для этого используется специальный конфигурационный макрос MODULE_DEVICE_TABLE. Он создаёт соответствия, которые позволяют утилите modprobe (и ей подобным) задействовать новые драйверы ядра.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Источник
6 шагов загрузки Linux на пальцах
 Нажмите кнопку включения питания на вашем системнике, и спустя несколько секунд вы увидите окно входа в систему.
Нажмите кнопку включения питания на вашем системнике, и спустя несколько секунд вы увидите окно входа в систему.
Посмею предположить, что каждого интересовало хоть когда-либо то, что происходит за занавесом заставок и загрузочных экранов с момента включения питания компьютера к моменту, когда предлагается войти в систему.
Я предлагаю вам познакомиться со следующими уровнями типичной загрузки Linux:
1. BIOS
2. MBR
3. GRUB
#boot=/dev/sda
default=0
timeout=5
splashimage=(hd0,0)/boot/grub/splash.xpm.gz
hiddenmenu
title CentOS (2.6.18-194.el5PAE)
root (hd0,0)
kernel /boot/vmlinuz-2.6.18-194.el5PAE ro root=LABEL=/
initrd /boot/initrd-2.6.18-194.el5PAE.img
4. Ядро или Kernel
5. Init
6. Уровень выполнения программ (Runlevel)
- Когда Линукс выполняет свою загрузку, вы можете наблюдать загрузку различных служб. К примеру, это могут быть сообщения типа «starting Postfix … OK» (запускается Postfix). Эти службы — и называются программами уровня выполнения, выполняемые из директории, которая соответствует нужному уровню выполнения.
- Исходя из настроек по умолчанию, система будет выполнять файлы в соответствии с нижеприведенными директориями.
- Выполнение уровня 0 – /etc/rc.d/rc0.d/
- Выполнение уровня 1 – /etc/rc.d/rc1.d/
- Выполнение уровня 2 – /etc/rc.d/rc2.d/
- Выполнение уровня 3 – /etc/rc.d/rc3.d/
- Выполнение уровня 4 – /etc/rc.d/rc4.d/
- Выполнение уровня 5 – /etc/rc.d/rc5.d/
- Выполнение уровня 6 – /etc/rc.d/rc6.d/
- Но имейте ввиду, что еще в каталоге /etc могут быть символические ссылки. Например, /etc/rc0.d залинкован на /etc/rc.d/rc0.d.
- В каталогах /etc/rc.d/rc*.d/ вы можете увидеть список программ, имя которых начинается из букв S и K.
- Программы, начинающиеся на S используются для запуска. S, потому что startup.
- Программы, которые начинаются с литеры K используются — правильно — для завершения работы. K, потому что kill.
- Еще есть номера рядом с буквами S и K в именах программ. Эти номера используются для определения порядка запуска этих программ.
- К примеру, S12syslog предназначен для запуска демона syslog, его порядковый номер 12. S80sendmail — для запуска демона sendmail, имеющего порядковый номер 80. Таким образом, программа syslog будет запущена перед sendmail.
Вот и все. Возможно, некоторым из вас это не ново и особого интереса не было при чтении статью, поскольку она более ориентирована на начально-средний уровень знакомства з Линуксом.
В таком случае могу лишь сказать, что «повторение — мать учения» (с).
Дополнения, исправления, уточнения
В комментариях неоднократно было апеллировано к тексту статьи, поэтому, думаю, стоит учесть некоторые важные комментарии хабрасообщества. (спасибо artemlight, 3al, Tishka17, HhyperH, Next_Alex, Ilya_Shmelykh, Aux, soomrack, Xpeh )
- artemlight:: «Ну скажем прямо — так грузятся далеко не все дистры». С ним согласилось большинство, отмечая и bsd-style init, u-boot, и хоть initrd в статье пропущен, стоить заметить, что он нужен ядру не во всех дистрибутивах. Также отмечено, что в slackware поддержка rc.d осуществляется только в качестве совместимости, а встраиваемые системы грузятся иначе. На декстопах иногда бывает EFI, а кроме того Linux популярен в мире embedded и там ещё куча разных платформ. Линукс в телефоне вообще иначе грузится.
- soomrack, ссылая на википедию: Еще хочется сделать замечание по поводу MBR, первого сектора и пр. Все несколько усложнилось за последние годы. Сейчас уместней говорить о EFI.
Источник



