- Мониторинг системы РОСА Linux
- Содержание
- Команда: top
- Команда: ps
- Команда: free
- Команда: du
- Команда: df
- Команда: who
- Команда: w
- Команда: vmstat
- Команда: iostat
- Установка и удаление программ
- Содержание
- Программа управления приложениями
- Установка и удаление программ
- Фильтры пакетов при разных способах запуска
- Установка обновлений
- Дополнительные приложения
- Опытным пользователям. Консольные инструменты управления пакетами
- Коротко о программах
- urpmi
- urpme
- urpmq и urpmf
- urpmi.addmedia и urpmi.removemedia
- Опытным пользователям. Репозитории backports и testing
- Опытным пользователям. Альтернативные способы установки программного обеспечения
- Сторонние репозитории
- Пересборка с помощью source RPM более позднего релиза РОСА Linux
- Установка программ с использование исходных кодов
Мониторинг системы РОСА Linux
Данная статья написана в основном для новичков в Linux. Большинство информации, представленной здесь, может быть найдено в страницах man. Если Вы опытный пользователь Linux — большинство из написанного здесь Вам должно быть знакомо. Так что можете спокойно переходить к другим статьям или же, если хотите проверить свои знания — можете просмотреть мельком. Но а в случае если Вы являетесь новичком в Linux, если Вам нудно читать страницы man и хочется узнать обо все этом побыстрей — эта статья для Вас.
Содержание
Команда: top
Это одна из чаще всего используемых комманд раздела мониторинга системы. Команда top предоставляет информацию о запущенных процессах, включая данные об использовании процессом CPU и памяти, пользователях, запустивших процесс и их pid (Process ID), а также о времени, прошедшем с момента запуска процесса. Данные все время обновляются с определенной частотой (по умолчанию 3 сек). Изменить частоту можно нажав клавишу «s» — ввести нужное число — Enter.
Вывод команды top показан ниже:
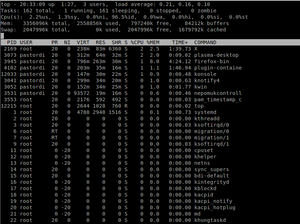
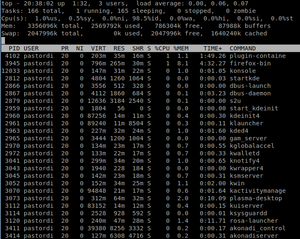
Вы можете модифицировать вид выводимой информации. Так, нажав «i» можно отключить вывод неработающих процессов. Повторное нажатие «i» вернет все в прежнее положение. «M» — отсортирует по количеству используемой памяти, а «P» — по использованию процессора. Приведенные опции вводились при запущенной команде top . В дополнение к этому, существуют опции, которые можно вводить при запуске команды. Например, с помощью «u» можно задать вывод только процессов, принадлежащих определенному пользователю:
С помощью опции «k» можно убить процесс, а «r» (renice) изменит его приоритет (колонка PR в выводе команды top). Для того, чтобы выйти из программы, нужно нажать клавишу «q».
Для более подробной информации о системных процессах следует обратиться к псевдофайловой системе /proc . Здесь информация о процессах представлена в виде файлов.

Команда: ps
ps — отображает список запущенных процессов.
По умолчанию информация дается только о процессах, ассоциированных с данным терминалом. Выводятся идентификатор процесса, идентификатор терминала, истраченное к данному моменту время ЦП и имя команды. Если нужна иная информация, следует пользоваться опциями. Следует заметить, что данная команда может работать как в стандартном виде записи опций (-опция), так и в режиме BSD (знака «-» между командой и опцией нет).
Так, чтобы просмотреть информацию о всех запущенных в системе процессах можно воспользоваться как
Обычно используется команда ps axu . Она выдает практически всю информацию о системе.
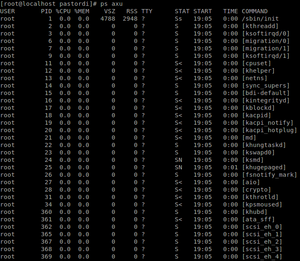
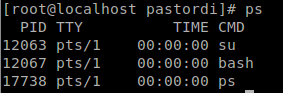
Вывод команды очень большой. Поэтому я привел лишь начало. Если же нужна информация о запущенных Вами процессах — воспользуйтесь.
В первом случае информация будет выведена в более подробном виде. Обычно данную программу запускают для того, чтобы узнать PID (первая колонка) команды, с последующим ее уничтожением с помощью команды kill -9 .
Команда: free
free показывает информацию о памяти компьютера, включающей в себя физическую память (RAM), swap, разделяемую память и буферы, используемые ядром. Вся информация выдается в килобайтах.

В строке Mem: показано использование физической памяти, в строке Swap: — использование пространства подкачки, а в строке -/+ buffers/cache: — объем физической памяти, выделенный в настоящее время для буферов системы. Команда free выводит лишь единоразово информацию о задействованной памяти. Для того, чтобы просматривать показатели каждые n секунд, нужно воспользоваться опцией -s n, где n — число в секундах. Но это может быть неудобно. Строки пробегают по экрану и человеку тяжело уловить разницу. Поэтому следует воспользоваться командой watch :
Вы можете менять задержку между обновлениями (по умолчанию 2 сек.) с помощью параметра -n или сделать так, чтобы любые отличия результатов выделялись, указав параметр -d, как показано в следующей команде:
Команда: du
du используется для того, чтобы узнать размер директории
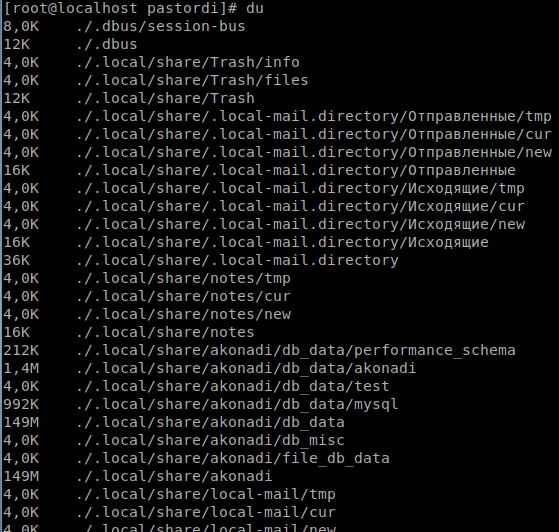
Без дополнительных опций команда du выдает список директорий, находящихся в текущей директории, и их размеры. Последняя строка показывает общий размер текущей директории. По умолчанию информация отображается в килобайтах. Во многих случаях это может быть неудобно. Поэтому воспользуемся некоторыми дополнительными опциями.

Размер всей папки — 2Гб. Опция -h задает отображение в более удобном виде.
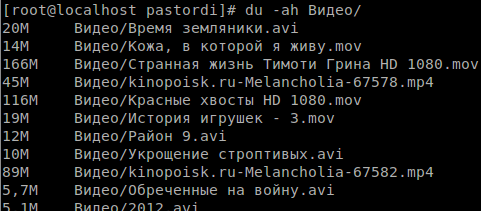
С помощью опции -a можно задать вывод размера каждого файла. Информация о полном размере вложенных папок также выводится.

Здесь опция -m задает, чтобы размер выводился в мегабайтах, а -c добавляет дополнительную строку, показывающую полный размер директории (итого). Таким образом мы можем воспользоваться командой grep , чтобы оставить лишь информацию о размере директории <<Источник|/home/pastordi/Видео/. Это будет полезно, если директория содержит много вложенных поддиректорий и файлов, а Вам нужно знать лишь ее полный размер. Хотя это можно сделать и проще:
Если же Вам нужно узнать размер директории без входящих в нее директорий, воспользуйтесь опцией -S.
Еще один пример из серии исключений:

Опция —exclude=*.mov — исключает из отображения полной иформации о размере директории /home/pastordi/Видео/ и ее поддиректории файлы, имеющие в своем названии .mov. Поскольку в указанной директории и поддиректориях находятся лишь изображения в формате .mov, все папки занимают 320Мб. Вместо .mov можно вставить любую последовательность символов. Например:
Команда: df
df — показывает информацию об использовании дискового пространства.

Вывод команды df состоит из 6 колонок. Fylesystem — физический раздел, Mounted on — точка монтирования этого раздела, 1K-blocks — размер раздела в килобайтах, Used — сколько занято, Available — свободно, Use% — сколько занято места в процентах.
Как и в случае с командой du , опция -h задает вывод в удобном для человека виде. Обычно это мегабайты и гигабайты. (-m — вывести только в мегабайтах) Команда df имеет и другие опции, но большинство пользователей ограничиваются лишь приведенными, поэтому я их рассматривать не буду. Если Вам интересно знать больше. обратитесь к man df .
Если хочется узнать лишь информацию о том, сколько места в процентах используется на заданном диске, то можно воспользоваться утилитами grep и cut .
Здесь grep из вывода команды df -h вырезает лишь строку, где встречается /dev/sda4 (на этот раздел у меня примонтирована директория /home ), а cut -c40-42 обрезает лишь 40-42 символы строки (именно там находится информация о процентном использовании разделов).
Команда: who
Поскольку операционная система Linux является многопользовательской, количество пользователей компьютера может быть больше чем один. Для того чтобы узнать, кто работает за компьютером в данный момент, и предназначена команда who . Эта команда показывает, кто работает за компьютером, сколько времени прошло с момента, когда он вошел в систему, и когда он это сделал.
С помощью этой команды можно узнать и информацию о себе:
Команда: w
w — это собранный воедино вывод команд uptime , who и ps a для более подробной информации о системе. Для того, чтобы задать информацию для одного пользователя, а не для всех, допишите имя пользователя к команде:

Команда: vmstat
vmstat — показывает информацию о процессах , виртуальной памяти, физических томах и активности ЦПУ . По умолчанию выдается полный список статистики с момента загрузки системы, что не очень полезно с точки зрения анализа ситуации в данный момент. Поэтому, стоит запускать vmstat с аргументом interval, указанным в секундах.
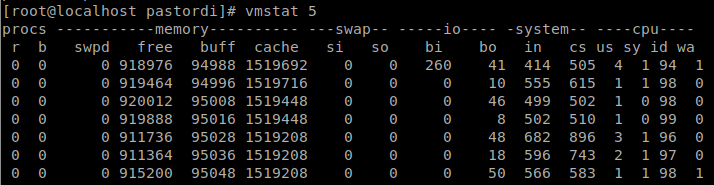
(вывод может отличаться в зависимости от используемой системы)
Каждая последующая линия показывают параметры системы за предыдущие 5 секунд. Рассмотрим поля вывода команды vmstat :
procs — число процессов, которые: r — находятся в очереди на выполнение;
b — заблокированы в ожидании ресурсов.
memory — информация о памяти: swpd — количество используемой виртуальной памяти;
free — незадействованная память; buff — количество памяти, используемой в качестве буфера, cache — в качестве кэш.
swap: si — количество свап-памяти взятой с диска, so — записанной на диск (/s).
IO: bi — количество блоков взятых с блочного устройства (жесткий диск), b0 — отправленных на блочное устройство.
System: in — количество прерываний за секунду, cs — количество контекстных переключений за секунду.
CPU: процент цикла процессора, затрачиваемый на различные режимы: us — пользователь; sy — система; id — ожидание; wa — ввод/вывод.
Команда: iostat
(входит в пакет sysstat).
iostat (input/output statistics) — без аргументов показывает краткую статистику использования процессора и дисковых операций ввода/вывода:
В первой строке представлены версия ядра системы, имя узла и текущая дата. Во второй — усредненная информация использования процессора после загрузки системы. В поле Device — данные использования дисковых устройств (hda и sda):
tps — число операций передачи данных (или операций ввода/вывода) в секунду;
Blk_read/s — число блоков (обычно 512 байт), прочитанных за секунду;
Blk_wrtn/s — число блоков, записанных за секунду;
Blk_read — общее число прочитанных блоков;
Blk_wrtn — общее число записанных блоков.
Если Вам не удобно возиться с блоками, можете воспользоваться ключами -k — для отображения в килобайтах и -m — мегабайтах.
Надеюсь, данный обзор поможет Вам быстро освоиться с работой с основными командами по мониторингу системы Linux. Конечно, здесь рассмотрены не все программы из этой области, но я надеюсь, что для новичка в Linux этого будет вполне достаточно.
Источник
Установка и удаление программ

Содержание
Программа управления приложениями

В системе имеется несколько программ, помогающих в управлении программным обеспечением. Наиболее важными являются программы установки, удаления приложений ( rpmdrake / drakrpm).
Установка и удаление программ
Программа управления программным обеспечением называется rpmdrake / drakrpm.
С её помощью также можно управлять сетевыми репозиториями (источниками программ) и репозиториями на сменных носителях. rpmdrake / drakrpm можно запустить несколькими способами:
- Выбрать в системном меню пункт «Установка и удаление программ»;
- Запустить параметры системы и выбрать там значок
- Запустить эмулятор терминала (например, konsole ), набрать в командной строке эмулятора терминала нужную команду:
- rpmdrake или drakrpm — «установка и удаление программ»;
- drakrpm-edit-media — изменение списка источников программ (репозиториев)
Фильтры пакетов при разных способах запуска
Подробнее об интерфейсе программы управления пакетами написано в этой статье.
В РОСА версии 2010.2 ) и более поздних rpmdrake / drakrpm запускается с фильтром «пакеты с графическим интерфейсом».
Команда rpmdrake-remove запускает rpmdrake / drakrpm с фильтром «установлен». Использование этого фильтра позволяет получить пользователю список всех установленных в системе пакетов, что является наиболее удобным способом представления списка для операций удаления пакетов из системы.
«Просмотр доступного программного обеспечения» (в «Управлении программами») запускает rpmdrake / drakrpm без прав администратора. В этом случае пользователь может просматривать установленные в системе пакеты, а также просматривать пакеты, доступные для установки, но ни удалять ни устанавливать пакеты в этом режиме нельзя.
Выбрав в «Управлении программами» (в «Центре управления РОСА») пункт «Установка и удаление программ» , можно изменять вид списка пакетов с помощью выпадающего меню, которое включает в себя следующие элементы: всё, метапакеты, пакеты с графическим интерфейсом, установлено, не установлено, все обновления, обновления безопасности, баг-фиксы (исправления ошибок) , обычные обновления и бэкпорты (backports).
Установка обновлений
Для поддержания системы в актуальном состоянии необходимо регулярно производить её обновление. Для решения этих задач в РОСА предусмотрен инструмент, помогающий в установке обновлений. Запустить его можно так:
- запустить «Центре управления РОСА», перейти к вкладке «Управление программами» — «Обновление системы»
Если программа обновления была запущена впервые с момента установки РОСА Linux на ваш компьютер, она спросит разрешения на подключение к серверам РОСА, чтобы получить список зеркал, с которых можно загружать обновления. После получения вашего согласия на подключение, программа попросит выбрать наиболее географически близкое к вам месторасположение зеркала. После того, как зеркало выбрано, программа получит список доступных обновлений. По умолчанию программа получает список пакетов, исправляющих проблемы с безопасностью и критически важные ошибки (баг-фиксы).
Дополнительные приложения
После процедуры установки РОСА Linux на компьютер пользователь будет иметь доступ только к программному обеспечению, находящемуся на CD или DVD (в зависимости от того, с какого носителя была произведена установка). Конечно, количество доступных программ в таком случае невелико. Для того, чтобы получить доступ к дополнительным приложениям, необходимо настроить систему на использование общедоступных репозиториев, содержащих пакеты для РОСА Linux.
Настройку репозиториев можно произвести в любой момент, в том числе и отказавшись от предложения rpmdrake настроить источники программ при первом запуске. Подробную инструкцию можно найти на этой странице.
После того как процесс добавления репозиториев завершился, запустив rpmdrake , можно увидеть, что список доступных пакетов стал гораздо больше.
Опытным пользователям. Консольные инструменты управления пакетами
Кроме средств с графическим интерфейсом существуют инструменты управления пакетами, использующие интерфейс командной строки. Список доступного программного обеспечения не зависит от выбора инструмента.
Полное описание этих приложений выходит за рамки этой страницы. Более подробную информацию можно получить на этой странице.
Коротко о программах
urpmi
urpmi — это инструмент установки программ. Его использование требует обладания правами администратора. Для установки пакета и всех его зависимостей, выполните команду urpmi packagename . Если ввести не полное имя пакета, а лишь его часть, urpmi выполнит поиск и выдаст предложения. Другая полезная команда — urpmi —auto-update — обновит все доступные пакеты из всех репозиториев и установит все доступные обновления.
urpme
urpme — это инструмент для удаления программ. Его использование требует обладания правами администратора. Для удаления пакета и всех его зависимостей, выполните команду urpme packagename . Если ввести не полное имя пакета, а лишь его часть, urpme выполнит поиск и выдаст предложения.
urpmq и urpmf
urpmq и urpmf являются средствами поиска. Они могут быть использованы с правами обычного пользователя. urpmf используется для поиска пакета, содержащего определённый файл. urpmq используется для всех других поисковых операций. Вызываемый без параметров urpmq ищет имена пакетов. Обратитесь к страницам руководства (man-страницам) для получения дополнительной информации.
urpmi.addmedia и urpmi.removemedia
Эти инструменты предназначены для добавления и удаления репозиториев. Обратитесь к страницам руководства (man-страницам) для получения информации об использовании необходимых параметров. Существует несколько веб-сайтов, которые помогут сгенерировать команды для добавления репозиториев программ с помощью urpmi.addmedia. Два наиболее популярных веб-ресурса: официальный поиск зеркал Mandriva и поддерживаемые сообществом веб-сайты EasyUrpmi, urpmi.mandriva.ru.
Опытным пользователям. Репозитории backports и testing
Для РОСА существуют несколько официальных репозиториев программного обеспечения различного типа. Для получения полного перечня репозиториев и их описания, обратитесь к этой странице.
Всё программное обеспечение, доступное в РОСА, разделено по различным «веткам». Таких ветки всего три: main , contrib и non-free . Ветка main содержит свободное программное обеспечение, поддерживаемое официальными обновлениями. Contrib содержит свободное программное обеспечение, которое не поддерживается официальными обновлениями по безопасности. В ветку non-free попадает программное обеспечение, использование которого ограничено лицензионными соображениями (проще говоря, несвободные программы и пакеты).
Каждая вышеописанная ветка делится на четыре репозитория: release , updates , testing и backports . Release является основным репозиторием, который содержит все пакеты в том состоянии, в котором они находились на момент официального выпуска релиза. Updates содержит обновления по безопасности. В репозиторий backports попадают новые версии пакетов, то есть в этом репозитории содержатся новые версии программ, а не обновления по безопасности и критически важных ошибок. Приведём пример: в РОСА Linux 2010.2 пакеты Mozilla Firefox в репозиториях /main/release и /main/updates имели одну и ту же версию 4.5 , а в /main/backports — 5.0 , но в отличие от версии 4.5 , версия 5.0 официально не поддерживалась обновлениями по безопасности, так как находилась в /main/backports .
Репозитории testing содержат тестовые версии пакетов. Если в пакете РОСА найдена ошибка, необходимо сообщить об этом мэйнтейнеру пакета. Обновлённый пакет загружается мэйнтейнером в соответствующий репозиторий testing . Пользователи, испытывающие неудобства от использования пакета с ошибкой, могут подключить репозиторий testing , воспользоваться обновлённым пакетом и помочь в проверке того, что данный пакет действительно исправляет найденную ошибку и не приводит к возникновению других ошибок. Для сообщений используется централизованная система сбора сообщений о найденных ошибках Helpdesk.
Рекомендуется не оставлять репозитории testing и backports постоянно включенными. Если нужно установить какой-то определённый пакет, находящийся в одном из этих репозиториев, можно включить эти репозитории, установить необходимый пакет, и снова отключить.
Если вы выбрали для добавления репозитории /backports и (или) /contrib , вы должны регулярно обновлять списки доступных пакетов, так как эти репозитории регулярно обновляются. Обновить список доступных пакетов можно используя пункт «Обновить источник» из меню «Файл».
Опытным пользователям. Альтернативные способы установки программного обеспечения
Порой может возникнуть потребность в установке приложения, которого нет в официальном репозитории, или в приложении более новой версии. В этом случае можно использовать альтернативные методы установки программного обеспечения.
Сторонние репозитории
Можно поискать сторонние репозитории для РОСА/Mandriva Linux. Они могут содержать программы, версии которых новее чем те, что содержатся в официальных репозиториях. Кроме того, можно найти пакеты, которых вообще нет в официальных репозиториях.
В основном, рекомендуется использовать официальные репозитории в тех случаях, когда это возможно, но если действительно появляется необходимость в приложениях (или их новых версиях), которых нет в официальных репозиториях, использование сторонних репозиториев является более безопасным вариантом, чем использование пакетов, предназначенных для других дистрибутивов, или сборка и установка программ с использованием исходных кодов.
РОСА/Mandriva не может предоставить какую-либо поддержку для пакетов, предоставляемых третьими сторонами. При возникновении проблем, связанных с использованием таких пакетов, просьба обращаться за поддержкой к стороннему поставщику этих пакетов.
Очень многие пользователи жалуются: «Это приложение не работает!» На этот счёт можно дать несколько рекомендаций. Старайтесь использовать приложения из официальных репозиториев. Помните, что приоритетным является использование именно официальных репозиториев. Кроме того, использование новейшей версии пакета (и, возможно, содержащей ошибки) не так важно, как использование более старой, но лучше оттестированной версии. Если использование программы более новой версии так критично, её можно найти в backports.

Пересборка с помощью source RPM более позднего релиза РОСА Linux
Если необходим какой-либо пакет или его версия, отсутствующий в официальном или стороннем репозиториях для данного релиза РОСА Linux, но доступный для последующих релизов (включая Cooker), можно попробовать перекомпилировать SRPM из более позднего релиза. Source RPM можно найти на любом официальном зеркале РОСА в подкаталоге релиза /SRPMS, где имеется необходимый вам пакет. Для создания source RPM, следуйте инструкциям из Основы RPM: Вам нужно будет выполнить шаги из раздела «Предварительные задачи», а затем, следовать инструкциям раздела «Из существующих «исходников» RPM».
Установка программ с использование исходных кодов
Если нужное приложение отсутствует в официальных и сторонних репозиториях, его можно установить, загрузив и скомпилировав исходный код этого приложения. Это — наименее предпочтительный способ установки программного обеспечения, к нему следует прибегать только в случае крайней необходимости. Для получения более подробной информации о процедуре установки приложений с использованием их исходного кода обратитесь к этой странице.
Источник



