Linux com port определить
Как получить список доступных системе COM портов в Linux? Раньше искал в /dev файлы типа ttyS*, но что-то тут не так. На моем компе имеется один физический компорт. В /dev есть 4 порта (ttyS0, ttyS1, ttyS2, ttyS3). Но, например когда пытаюсь добавить в систему принтер, визард просит выбрать порт и показывает только ОДИН доступный компорт. Всё правильно, порт всего один. Хотя в девах их 4, в визарде только 1. На другом компе физически есть 1 компорт, а в /dev их аш 5. Как из кода в Linux-e можно получить список доступных компортов? или как проверить все ttyS0, ttyS1, ttyS2, ttyS3 и найти среди них рабочий(е)(реальный(е))?
| Оглавление |
|
| Сообщения по теме | [Сортировка по времени | RSS] |
| 1. «Как получить список доступных системе COM портов? « | + / – | |
Сообщение от ACCA  (ok) on 21-Янв-10, 18:37 (ok) on 21-Янв-10, 18:37 | ||
| Высказать мнение | Ответить | Правка | ^ | Наверх | Cообщить модератору | ||
| 2. «Как получить список доступных системе COM портов? « | + / – | |
| Сообщение от juvf (ok) on 08-Фев-10, 08:06 | ||
| Спасибо. Таким образом смог выделить из всех ttyS* только рабочие. А можно подобным образом получить инфу о портах типа ttyUSB*? Или достаточно по наличию в /dev/ttyUSB0 определить, что такой порт доступен системе? | ||
| Высказать мнение | Ответить | Правка | ^ | Наверх | Cообщить модератору | ||
| 3. «Как получить список доступных системе COM портов? « | + / – | |
| Сообщение от ACCA (ok) on 10-Фев-10, 23:44 | ||
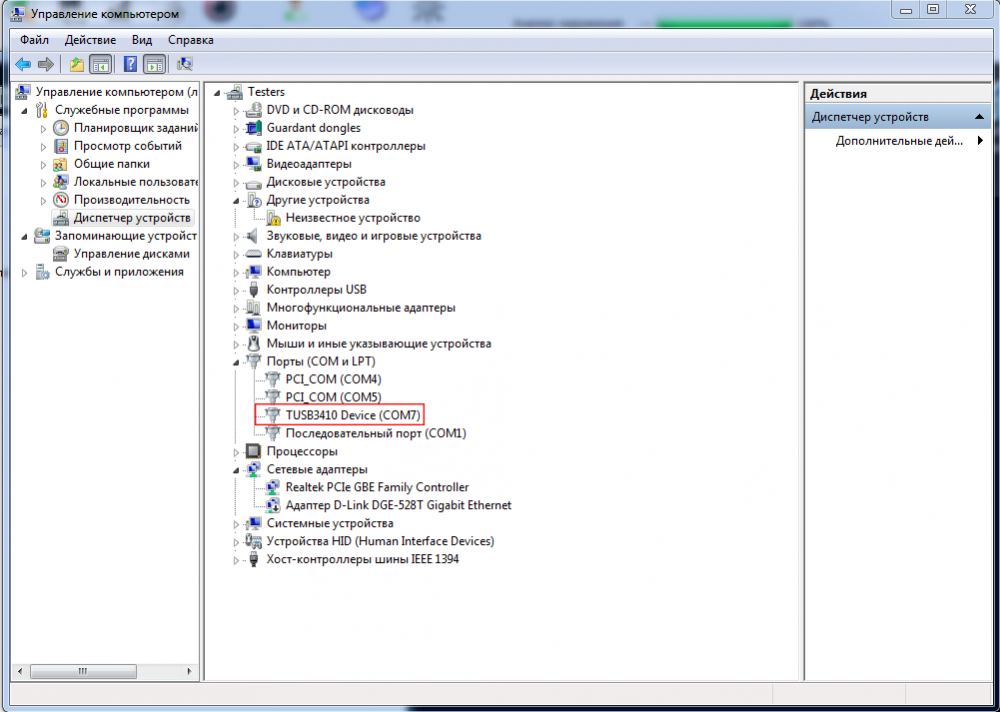
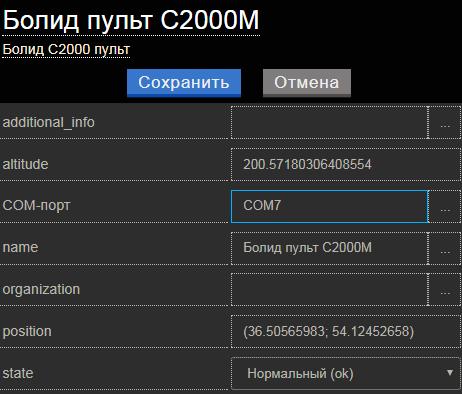
Смотря откуда этот /dev/ttyUSB* взялся. Если его udev или ещё какой hal сделал — почти достаточно. Посмотри, что такое /dev. Если udev filesystem, то скорее всего можно — /dev/ttyUSB* создаются и убираются динамически, если udev скрипт не глюканул. Сделай `lshal’, почитаешь много интересного про ttyUSB. dmesg | grep ttyUSB тоже поможет. Источник Определение номера подключенного COM портаДля правильного подключения оборудования, необходимо определить номер COM порта. Проверка проводится при условии, что сервер полностью развернут, и работает заведомо правильно. WindowsДля определения номера COM порта на ОС Windows необходимо:
8. После того, как номер COM-порта определен его необходимо указать в схеме SCADA, для устройства, подключенного многожильным кабелем.
LinuxДля определения номера COM порта на ОС Linux необходимо:
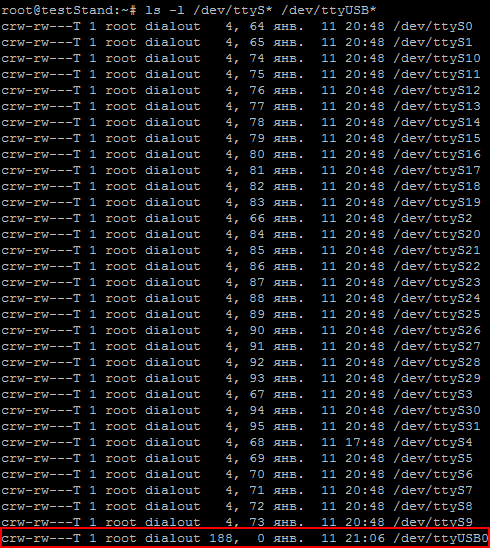
4. После выполнения команды отобразится список всех доступных COM-портов
dev/ttyS0 — первый COM порт /dev/ttyS1 — второй COM порт /dev/ttyUSB0 — специальный кабель-переходник из USB в COM (Gembird UAS111) 5. Установить программу minicom. Для этого вводим следующую команду: 6. Найти многожильный кабель в оплётке длиной 4-6 см.
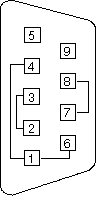
7. Соединить 2 и 3 выводы COM порта перемычкой из кусочка многожильного провода. Оплётка будет удерживать провод на контактах, а металлические жилы внутри будут проводниками. 8. Настроить программу minicom. Для этого вводим следующую команду:
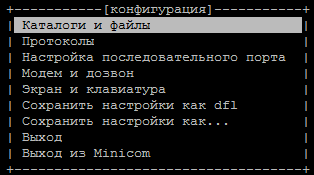
9. Выбрать «Настройка последовательного порта»
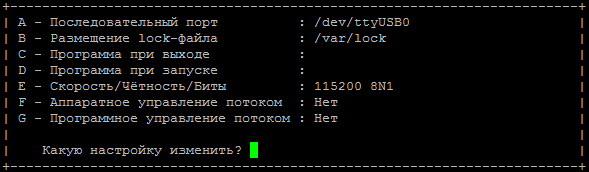
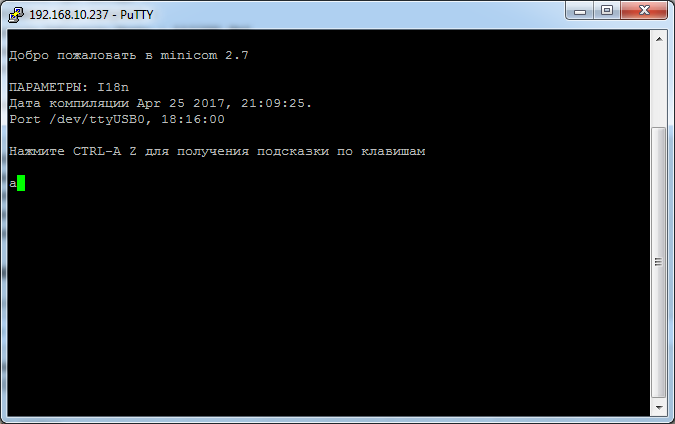
10. Нажимая А поочередно выбираем порты (если используется кабель-переходник из USB в COM то выбрать /dev/ttyUSB0) 11. Отключить аппаратное управление потоком, нажав «F» 12. Выйти из настроек нажав «Enter» 13. Сохранить настройки по умолчанию «Сохранить настройки как dfl» 14. Выйти из minicom 15. Запустить minicom выполнив команду: 16. Нажать на любую клавишу на клавиатуре
В случае, если символы не вводятся с клавиатуры, необходимо вернуться к пункту 10, и выбрать другой COM-порт Если вводимые символы отображаются — значит COM-порт определен верно 17. После того, как номер COM-порта определен его необходимо указать в схеме SCADA, для устройства, подключенного многожильным кабелем. Источник Работа с COM-портом (RS-232) в LinuxУрок посвящен интерфейсу RS-232, который в простонародье называют COM-порт. Мы разберемся как он представлен в Linux, какой у него интерфейс, научимся его конфигурировать, а также узнаем, что написание программы для коммуникации через COM-порт в Linux не представляет сложности. Разговор o коммуникации через COM-порт в Linux следует начать с того, что заметить, что каждому COM-порту в операционной системе соответствует файл устройства телетайп или tty. Он находится в каталоге dev и имеет имя /dev/ttyS и номер. Если посмотреть на мой каталог, то мы увидим следующее, что у меня таких файлов очень много [0:55]. Но по факту, в моем компьютере есть один физический COM-порт. Давайте попробуем его найти. Сделать это можно с помощью команды dmesg, которая выводит сообщения с момента инициализации системы. Если набрать $dmeg | grep «ttyS» Для того, чтобы сконфигурировать мой COM-порт по умолчанию в Linux можно воспользоваться программой mincom, запускать её нужно от суперпользователя, либо добавить текущего пользователя в группу dialout. Запустим $sudo minicom -s Ключ -s – обозначает конфигурацию (setup), Здесь мы видим следующее [2:24]. Есть параметры последовательного порта, важно прописать правильно файл, то есть указать тот файл, который у вас в системе связан с физическим COM-портом, Второй важный момент – это настройка параметров обмена (ключ Е). Дело в том, что корректный обмен данными по последовательному соединению возможен только тогда, когда обе стороны имеют один и тот же набор параметров. В этом окне можно набор этих параметров менять [3:08]. Мы видим, что у нас задана скорость 8 бит, нет контроля четности, и один стоповый бит. Именно здесь можно это все увидеть и настроить так, как требуется или, как требует ваше устройство. Сохраняем конфигурацию по умолчанию. Дальше будем взаимодействовать — сначала с помощью команды терминала, чтобы проверить, как вручную это работает; а потом напишем небольшую программу, которая будет слать данные в COM-порт. Выйти из Mincom можно набрав ctrl-A-X. Для того чтобы проверить, как работает COM-порт можно воспользоваться программой miniterm [4:03]. Я создал виртуальную машину с обычным linux, у неё указал, что в наличии имеется один COM-порт (это COM1), по умолчанию назначились линии обработки запросов прерывания. Я ассоциировал этот COM-порт с файлом на моей host-машине. С этого файла мы будем читать данные записанные в порт. Итак, мы видим, что в левой части экрана у нас есть логин на виртуальную машину [4:46]. Давайте проверим с помощью minicom -s, как настроены коммуникации. Проверим, что /dev/ttyS0 – это действительно правильный физический порт – да, это именно так. Теперь мы можем вызвать команду $sudo miniterm она говорит, что есть следующие доступные порты, и просит ввести, через какой порт работать. Далее я попадаю терминал, связанный с COM-портом, где могу набирать текст. Набирая команды, я вижу «эхо» в моем файле справа. Обратите внимание, что я пишу в левом окне, а на экране надпись мы видим в правом. В левом окошке – виртуальная машина, на которой настроен порт. В правом – тот лог, который мы видим в файле ассоциированном с этим COM-портом на host-машине. Создадим какой-нибудь каталог, в котором будем разрабатывать приложение. Как это ни странно, приложение будет выглядеть очень просто, потому что все действия, которые мы делаем с COM-портом в linux, это действия с файлами с использованием тех же самых файловых операций. Нам потребуется stdio.h, unistd.h, чтобы получить доступ – функциям open/read/write, fcntl.h, чтобы иметь возможность использовать файловые флажки. Открываем файловый дескриптор, COM-порт, имя, и флаги из COM-порта. Проверим, что файловый дескриптор у нас открылся, то есть если порт меньше или равен 0, то есть какая-то ошибка, оповестим об этом пользователя и вернем управление. В противном случае, можно писать в этот файловый дескриптор. write принимает файловый дескриптор, указатель на буфер, размер. Дальше мы закрываем файловый дескриптор и возвращаем управление. Приложение готово. Теперь давайте попробуем запустить то, что у нас вышло, вернее, скомпилировать и запустить [10:40]. При запуске приложения произошла ошибка, но она вызвана понятными причинами, потому что пользователь должен был быть включен группу dialout [11:03], или нам надо запускать приложение от суперпользователя. Сделаем это. И сразу видим, что в нашем окошке появилась запись «hello world». Можно повторить и увидеть, что все работает корректно. Точно таким же образом можно осуществлять чтение из COM-порта, то есть использовать не функцию write, а функцию read. Источник Кунг-фу стиля Linux: разбираемся с последовательными портамиРаньше последовательные порты были буквально повсюду. И они, в каком-то смысле, никуда и не делись, так как многое, что подключается к компьютеру по USB, на самом деле, выглядит для системы как последовательный порт. Проблема тут заключается в том, что в наши дни всё в мире завязано на компьютерные сети. Конечно, можно купить терминальный сервер, который преобразует последовательный порт в интерфейс Ethernet. Но это совсем не интересно. Здесь я хочу рассказать о том, как пробрасывать последовательные порты по сети с использованием существующих Linux-инструментов. Решение это не идеальное, оно оказывается работоспособным далеко не всегда, но если оно работает, то работает оно хорошо.
Всё — это файл — до тех пор, пока это не такКогда-то в прошлом ОС Unix — прародитель Linux — практически всё считала файлом. Все файлы были созданы более или менее равными. Программы не заботило то, с чем именно им приходилось работать: с локальными файлами, с файлами, доступными по сети, с файлами, считанными с ленточного накопителя, или с файлами, прибывшими по именованному каналу. Но ситуация начала меняться. Несмотря на то, что в Linux последовательный порт — это просто файл, у него имеются некоторые особые атрибуты, которые позволяют, например, задать скорость порта в бодах. И, что ещё хуже, некоторые программы слишком много «знали» о файлах и настоятельно требовали придерживаться определённых соглашений по их именованию. Поэтому, в теории, у пользователя должна была быть возможность создать сетевой сокет и подключить один из его концов к последовательному порту, а другой — к программе. После этого всё должно было нормально работать. Но это — в теории.
Переходник USB/последовательный порт Практика, конечно, отличается от теории. В некоторых случаях, очень простых, это может и сработать. Для настройки вышеописанной схемы работы с последовательными портами можно воспользоваться утилитой socat (это — нечто вроде cat для сокетов). Но если программа, которую мы пытаемся таким образом обмануть, попробует, например, задать скорость порта в бодах, то у неё, вероятно, ничего не получится. А некоторые программы даже не распознают такой вот ненастоящий последовательный порт. Подробности о socatПрограмма socat напоминает волшебный кабель-переходник, который просто передаёт на выход всё, что поступает на его вход, и, кроме того, поддерживает передачу данных в обратном направлении. Программа может читать данные из файлов, из каналов, с различных устройств, из сокетов и из некоторых других мест. Например, может понадобиться создать простой TCP-прокси для перенаправления соединений с одного локального хоста на другой хост. С помощью socat решить эту задачу очень просто: То, что получится в результате выполнения этой команды, поддерживает лишь одно соединение. Но socat можно настроить так, чтобы для новых соединений создавались бы форки, что позволяет обрабатывать множество запросов. ПроблемаПравда, если попытаться применить socat для работы с последовательным портом, то получившаяся конструкция вряд ли будет работать без множества дополнительных настроек. Но нужно это так часто, что существует несколько программ, способных нам в этом помочь. В большинстве Linux-дистрибутивов заработает программа ser2net , которая умеет преобразовывать последовательный порт в сокет. Если ser2net кому-то не подойдёт — можно воспользоваться Python-кодом, который имеется среди примеров использования библиотеки pyserial . Правда, та версия pyserial , которая установлена в используемом дистрибутиве, может оказаться слишком старой для поддержки этого кода. Если это так и есть — нужно установить эту библиотеку в обход системного менеджера пакетов, например, воспользовавшись pip . Далее я исхожу из предположения о том, что для работы с последовательным портом используется ser2net . Эта утилита обычно устанавливается в виде системной службы, для её настройки можно прибегнуть к редактированию файла /etc/ser2net.conf . Я убрал из этого файла всё, что там было, и добавил туда описания двух нужных мне последовательных портов, указав, кроме прочего, их желаемую скорость в бодах: После редактирования этого файла сервис надо перезапустить (вероятно, тут подойдёт команда systemctl restart ser2net ; а если она не сработает в первый раз — её стоит попробовать выполнить ещё раз, так как иногда она пытается запустить новую копию сервиса ещё до того, как предыдущая копия полностью завершила работу). Для целей отладки может понадобиться остановить сервис и запустить его, включив возможность вывода отладочных сообщений: Но, в любом случае, после того, как сервер заработает, указанные порты (7777 и 7778 в моём конфигурационном файле) будут работать как соответствующие последовательные порты. Хочу сделать тут несколько замечаний. Если вы пытаетесь проделать это с 3D-принтером, и если у вас запущено нечто вроде Octoprint, то вам понадобится или закрыть программу, или найти другой способ «отвязать» её от принтерного порта до выполнения вышеописанных настроек. Это применимо к любой программе, удерживающей последовательный порт, который нам нужно открыть. В случае с некоторыми стандартными портами нужно удостовериться в том, что механизм входа в систему не удерживает порт открытым, ожидая пользователя. То, как именно это всё заработает, зависит от конкретной системы. То же самое относится и к файрволу. Если прослушивается порт 7777 и при этом используется файрвол, нужно настроить его так, чтобы он разрешал бы подключения к этому порту. При этом надо помнить о том, что для открытия портов с небольшими номерами обычно нужны root-права. КлиентНа стороне клиента можно использовать socat , но некоторые программы поймут, что перед ними — не настоящий последовательный порт. Правда, никто не мешает попробовать такую команду: Кое-какие программы, правда, ищут устройства лишь в папке /dev . Если это именно так — понадобится запустить socat с root-правами (воспользовавшись sudo ), а затем нужно будет настроить /dev/ttyNET0 , дав разрешения на чтение и запись (например — sudo chmod 666 /dev/ttyNET0 ). ТестированиеЕсли созданный механизм выглядит работоспособным, я, всё равно, не рекомендую сразу же пробовать пользоваться им в программе, для которой он создавался. Советую сначала протестировать его, воспользовавшись чем-то вроде picocom . После запуска socat , например, на клиентской машине должна нормально отработать такая команда:
Утилита picocom может обмениваться данными по сети с использованием виртуального последовательного порта Если вы попробуете сделать нечто подобное, то вам, понятно, нужно будет указать актуальные для вашей системы имя и скорость порта. У вас, в результате, должна появиться возможность обмениваться данными с удалённым устройством. Если это не получится — нужно разобраться с причинами неполадки до того, как виртуальный порт можно будет использовать в обычной программе. Если в основе вашего последовательного устройства не лежит передача текста, то, возможно, вам больше повезёт с cutecom. Но, к сожалению, эта программа знает о том, что виртуальный последовательный порт — это порт поддельный, и не позволит его выбрать. Правда, программа это опенсорсная, поэтому не слишком сложно будет создать её собственную версию, которая примет любое нужное имя устройства. Конечно, есть и другие варианты. Например — выбрать ненастоящий последовательный порт позволит gtkterm . Если в ходе тестирования возникнет ошибка протокола, может оказаться так, что последовательный порт перемещён (например — был /dev/ttyUSB0 , а потом стал /dev/ttyUSB1 ), или окажется, что неправильно настроена скорость порта. Сообщения об ошибках не особенно информативны, но при поиске проблем стоит помнить об опции -d программы ser2net .
Документация программы ttynvt устроена просто, но отличается точностью Когда же дело дойдёт до использования виртуального последовательного порта в обычной программе, всё может заработать как надо. Но может появиться ошибка, или, в некоторых случаях, программа может не позволить выбрать соответствующий файл, так как он не ассоциирован с настоящим последовательным портом. Иногда бывает так, что в чём-то просто не везёт. Правда, тут может пригодиться более интеллектуальный клиент, который знает толк в последовательных портах. Например — ttynvt. Программу, возможно, придётся собрать из исходников, но сделать это очень просто. Она зависит от libfuse , но больше ей ничего особенного не нужно. После того, как программа будет готова к работе — попробуйте нечто вроде такой команды: Будет создано устройство /dev/ttyNET0 (отсюда — и потребность в root-правах). В моей системе у нового устройства были права на чтение и запись root-уровня, оно входило в группу dialout . Если вы воспользуетесь этой программой, то вам, возможно, нужно будет проверить и настроить под себя её разрешения. Перед использованием в обычной программе то, что получилось, опять же, рекомендуется протестировать с помощью picocom . А во время проведения теста стоит скрестить пальцы и надеяться на удачу. Почему всё так нескладно?Я, когда связался с последовательными портами, хотел сделать так, чтобы программа Lightburn для лазерного резака работала бы на мощной машине с использованием удалённого рабочего стола. Мне хотелось, чтобы резак был бы подключён к USB-порту на простом локальном компьютере, и чтобы программа взаимодействовала бы с поддельным портом в более серьёзной системе. Но, к сожалению, сейчас ситуация такова, что Lightburn — программа слишком умная, которая не ведётся на мои хитрости и не хочет показывать мне виртуальные последовательные порты. И нет известного мне способа заставить её использовать имя файла, выбранное мной. Поэтому я даже не могу проверить то, как она работает с виртуальным портом. Правда, мне удалось протестировать подобные порты с некоторыми другими G-Code-программами. И всё это работало хорошо. Я сообщил о моей проблеме разработчикам Lightburn. Возможно, в тот момент, когда вы это читаете, проблема уже решена. Парадигма «всё — это файл» чрезвычайно мощна. Но, к сожалению, с каждым годом она всё меньше соответствует реальному положению дел. Это создаёт всё больше препятствий тем, кто хочет сделать в Linux что-то интересное и не совсем обычное. Но, как это обычно бывает в Linux, желаемого, всё равно, как-то можно достичь. Я не сомневаюсь в том, что смог бы отследить вызовы, которые выполняет Lightburn для открытия порта, а после этого смог бы найти способ обмануть программу и подсунуть ей последовательный клиент. Но я надеюсь, что делать этого мне не придётся. Возникала ли у вас необходимость в работе с виртуальными последовательными портами в Linux? Источник | ||