- Самодельный ЧПУ станок
- Разделы сайта
- Интересное предложение
- Лучшее
- Статистика
- Linux для чпу станков
- LinuxCNC 2.8 Downloads
- LinuxCNC 2.7 Downloads
- LinuxCNC Packages
- Установка LinuxCNC
- Сообщения 3
- 1 Тема от soulg24 2016-06-12 19:28:27 (изменено: soulg24, 2016-06-12 19:51:19)
- Тема: Установка LinuxCNC
- Погружение в LinuxCNC
- Сообщения 9
- 1 Тема от warik 2014-12-17 17:07:24
- Тема: Погружение в LinuxCNC
- 2 Ответ от warik 2014-12-17 17:08:40
- Re: Погружение в LinuxCNC
- 3 Ответ от warik 2014-12-17 17:14:55
- Re: Погружение в LinuxCNC
- 4 Ответ от warik 2014-12-17 17:19:59
- Re: Погружение в LinuxCNC
Самодельный ЧПУ станок
Разделы сайта
Интересное предложение

Лучшее
Статистика

Designed by:


Сегодня я хочу поднять вопрос о софте который используется для обработки деталей на ЧПУ станках.
Если вы используете ЧПУ фрезер в производстве, то вопрос о легальности софта встает в полный рост. Все коммерческие программы управления ЧПУ станками стоят весьма не малых денег, таких, что малому бизнесу на первых порах не осилить. Тут и встает вопрос о том, как и легальный софт использовать и заплатить за него поменьше.
Конечно, в интернете можно найти много бесплатного и самописного софта, но зачастую данное ПО оказывается или малорабочим или заточенным под конкретный контроллер да и для работы требует то DOS, то Win 95-98. А уж чего стоит отсутствие богатства функционала!
Но есть выход из этого, пренеприятного положения — это разработанный умельцами LinuxCNC. Фактически это программа управления ЧПУ станком совмещенная с операционной системой. На текущий момент в сборке используется бесплатная Ubuntu. Скачать бесплатно программу для управления ЧПУ станком
можно на сайте разработчиков — тут .
Разработчики ПО LinuxCNC переписали частично саму ОС для того, что бы улучшить работу с ЧПУ станками в реальном времени. Ведь в основе своей Linux и тем более Windows не предназначены для работы с портами в реальном времени с ограниченными тайменгами. А именно этого и требуется для работы со станками с числовым программным управлением. При этом, промышленные станки имеют свой встроенный блок управления, на который подается список команд, а работу с осями выполняет уже микроконтроллер. А самописные программы для ЧПУ работают из под DOSа или старых версий виндовс, где можно было стучаться к портам напрямую, а не через виртуальное управление железом.
Программа LinuxCNC на сайте разработчика есть как в виде инсталяционного пакета, так и в виде LifeCD на базе Ubuntu 8.04 Hardy Heron.
Вам достаточно записать образ на диск и загрузиться с него, после чего вы сразу сможете работать с LinuxCNC и управлять своим самодельным ЧПУ устройством.
LinuxCNC это универсальная программа, которая может может управлять фрезерно-гравировальным станком, лазерной и плазменной резкой, а так же любыми другими станками. Было бы желание разобраться и настроить программу. Но самое главное, это то, что LinuxCNC абсолютно бесплатен, имеет свою техподдержку и постоянно развивается
На сегодняшний день OS Ubuntu, на базе которой сделан дистрибутив LinuxCNC, это одна из наиболее успешных реализаций Linux для ПК. Устанавливаясь на комп Ubuntu автоматически находит практически 96% известных устройств, а пользовательский интерфейс может поспорить с Windows 7.
Для нормальной работы вам необходим комп с 512 Мб оперативной памяти и 4 Gb свободного места на харде. Процессор желателен не менее 1500 Мгц. Если судить по сегодняшним меркам, то эти требования довольно слабые. Всегда можно взять недорого ноутбук 5-6 летней давности с рук с подобной конфигураций.
Документацию по программе управления ЧПУ станком можно взять здесь . Она лежит в PDF файлах так же доступна Wiki и сообщество с форумом. Все это добро на английском языке, но такова уж судьба бесплатных проектов.
Остается лишь привести пример работы 4-х осевого ЧПУ станка под управлением LinuxCNC и на этом завершить обзор.
Источник
Linux для чпу станков
LinuxCNC 2.8 Downloads
The Debian 10 Buster ISO uses a PREEMPT-RT patch which is close to mainstream Linux but does not, in some cases, give quite such good realtime performance as the previous RTAI kernel. It is very often more than good enough. It should probably be the first version tried even if using a parallel port. This is compatible with all Mesa and Pico interface boards.
- LinuxCNC 2.8.0 Debian 7 Wheezy RTAI
Users requiring a known-stable RTAI installation can install the Debian 7 Wheezy ISO and then upgrade as described in 2.8 documents.
- LinuxCNC 2.8.2 Debian 10 Buster RTAI
The more adventurous can install the Buster ISO and then install the experimental RTAI kernel as described in 2.8 documents
Raspberry Pi 4 Uspace compatible with Mesa Ethernet and SPI interface boards.
LinuxCNC 2.7 Downloads
The Debian 7 Wheezy ISO uses RTAI which LinuxCNC has used as the Realtime layer since the very beginning. This gives the best real-time performance and is generally a better choice for software stepping using a parallel port. However making a stable version of a 4.x Kernel for Stretch (and eventually Buster) has proven difficult, which is partly why we still distribute the EOL Wheezy. This is compatible with Mesa PCI and PCIe and Pico interface boards but is not compatible with Mesa Ethernet interface boards.
The Debian 9 Stretch ISO uses a PREEMPT-RT patch which is closer to mainstream Linux but does not, in some cases, give quite such good realtime performance. It is very often more than good enough. It should probably be the first version tried even if using a parallel port. This is compatible with all Mesa and Pico interface boards.
The LinuxCNC Buildbot builds several different versions of OS’s and is the best way to get the 2.8 (master) version. If you have a gantry type of machine the 2.8 supports dual motor gantry homing.
More information on downloading and installing is in the LinuxCNC Documents
LinuxCNC Packages
LinuxCNC debian packages aka .deb files can be installed on a system with dpkg from the command line or with GDebi as a graphical install method. You will need to have a Preempt RT kernel to run Uspace.
Источник
Установка LinuxCNC
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Сообщения 3
1 Тема от soulg24 2016-06-12 19:28:27 (изменено: soulg24, 2016-06-12 19:51:19)
- soulg24
- Участник
- Неактивен
- Зарегистрирован: 2016-06-11
- Сообщений: 10
Тема: Установка LinuxCNC
Что бы познакомится с LinuxCNC её не обязательно устанавливать на Ваш пк, достаточно будет загрузится с флешки в режим Live.

В этом режиме не будет производится установка какого либо ПО,

система полностью загрузится с флешки, и у Вас будет возможность «покрутить настройки в программе, и просто потыкать Linux (Debian)»



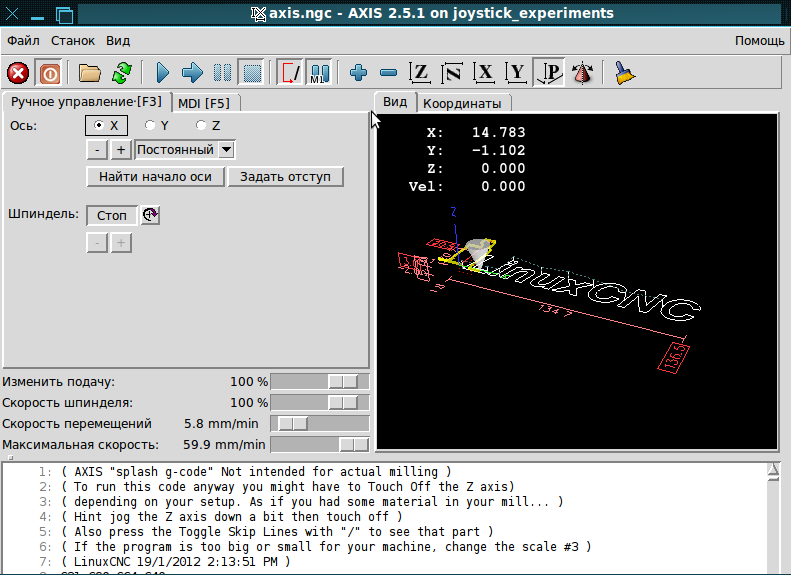
Главный интерфейс который часто изображен называется — AXIS , можно дополнять этот интерфейс с помощью python , а также графических элементов из Tk/Gtk библиотек.
Перед установкой Вам следует определится куда Вы собираетесь устанавливать Linux, на отдельный винт (жесткий диск) или на тот же винт рядом с основной ОС Windows (Не забудьте сделать резервную копию системы, дабы не потерять важные данные). Перед установкой вам лучше отключить все винты, и оставить только тот на который Вы планируете установить Linux (мера предосторожности не более того).
Все действия Вы выполняете на свой страх и риск.
Установка LinuxCNC с LiveCD
1 Загружаете iso образ LiveCD. http://www.linuxcnc.org/linuxcnc-2.7-wheezy.iso
2 Записываете его на CD, или Flash.
Инструкция по записи на Flash на сайте ubuntu: http://www.ubuntu.com/download/desktop/ … on-windows.
3 Загружаетесь с записанного CD или Flash.
4 Для установки в графическом режиме выберите: Install (Graphical)

5 Выберите русский язык (русский язык присутствует в большинстве Linux дистрибутивов)

6 Выберем место расположения
7 Настроки клавиатуры
8 Тут нам необходимо выбрать сочетании клавиш для переключения языка , мне удобнее Ctrl+Shift

дальнейшие шаги я думаю не имеет смысла описывать, следуйте подсказкам.
Добавлено: 2016-06-12 19:34:35

Добавлено: 2016-06-12 19:37:17

Добавлено: 2016-06-12 19:57:07
9 разметка диска, если у вас есть свободный винт (жесткий диск) то установку лучше производить на него, и выбрать пункт Авто — использовать весь диск





Источник
Погружение в LinuxCNC
Чтобы отправить ответ, вы должны войти или зарегистрироваться
Сообщения 9
1 Тема от warik 2014-12-17 17:07:24

- warik
- Модератор
- Неактивен

- Зарегистрирован: 2014-12-08
- Сообщений: 36
Тема: Погружение в LinuxCNC
Статья для тех кто плохо знает английский и не любит читать километры форумов
2 Ответ от warik 2014-12-17 17:08:40
- warik
- Модератор
- Неактивен
- Зарегистрирован: 2014-12-08
- Сообщений: 36
Re: Погружение в LinuxCNC
1. Что такое LinuxCNC?
Linux обладает замечательными свойствами, его можно поставить куда хочешь даже на ATmega микроконтроллер. Или с помощью него можно сделать из обычного компьютера что то специфичное. Например на заре Linux его любили за то что он позволяет на дешевом оборудование создавать небольшие сервера, программно маршрутизировать пакеты и.т.д.
LinuxCNC — набор утилит который позволяет сделать из вашего компьютера стойку управления ЧПУ. Он позволяет программно генерировать шаги в случае управление по типу STEP-DIR-ENABLE, обрабатывать информацию с датчиков, позволяет вам собрать собственную заточенную под ваш станок — панель управления.
Ну а также LinuxCNC поддерживает работу с промышленными платами с аппаратной обработкой G-code — так называемые Mesa платы.
3 Ответ от warik 2014-12-17 17:14:55
- warik
- Модератор
- Неактивен
- Зарегистрирован: 2014-12-08
- Сообщений: 36
Re: Погружение в LinuxCNC
2. Состав LinuxCNC
2.1 RealTime Linux ядро
Простое ядро(ванильное) в тех.процессах связанных с реальным временем. Реализаций real time в linux несколько, конкретно linuxcnc использует RTAI и хотя RTAI ушел далеко вперед(3.9 версия реализована) , на данный момент поддерживаются ядра 2.4 и 2.6 , вы скажите фи, а я отвечу что на производстве железо меняется крайне медленно, что большинство софта использует DOS а также что современный многоядерный монстр может показать… результаты на jitter time хуже чем одноядерный комп.
2.2 Драйвера
На данный момент хорошо реализованы и опробованы на практике, с работой в реальном времени , это параллельный порт(до 3-х штук) а также RS232 или COM-PORT.
Также ведутся работы(не могу оценить степень их активности), по реализации real time управления через Ethernet.

USB — использует буфферицацию и и говорить о настоящем real time не получается, в общем, с этим все сложно.
Итак представьте что вы делает сложную дугу, дугу можно представить как набор ступенчатых шажков.
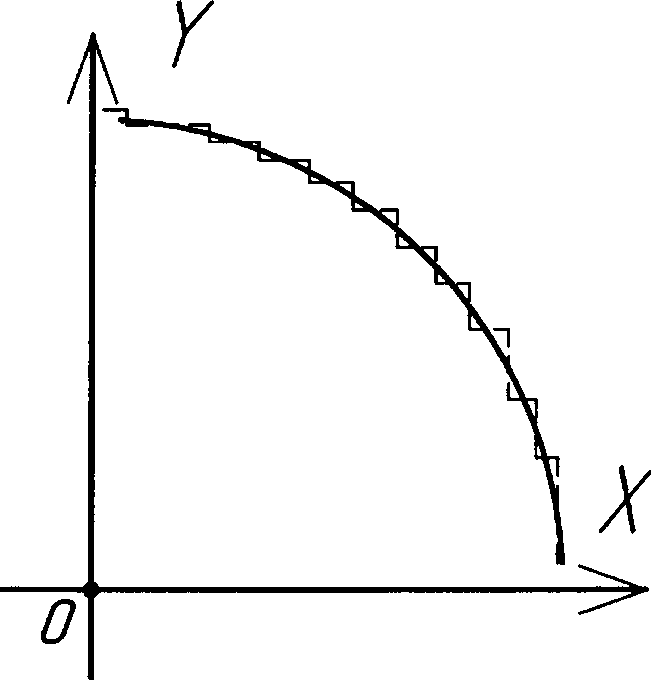
Чем меньше размер шагов тем ближе мы к реальному изображению кривой, конечно это зависит и от минимального шага станка.. ну да ладно. В общем если наша задача увеличить частоту с которой компьютер передает сигналы управляющей плате, то нужно уменьшать параметр jitter time, один из способов это увеличение частоты процессора, также можно избавляться от «лишних» процессов в системе, ну там браузер выключить, музыку на этом компьютере не слушать, compiz отрубить, network demon-а развеять…. ИЗБАВИТСЯ ОТ ГРАФИЧЕСКОГО СЕРВЕРА, но это совсем хардкор и теоретически linuxcnc предполагает клиент-серверную модель, так что интерфейс будет работать на компе с браузерами и прочими кофеварками, а преобразователь G-code и вся управляющая логика на другом.
Другой вариант использовать другой вариант и на железе с помощью ПЛИС преобразовывать G-code в управляющие сигналы, количество читаемых/передаваемых компьютером команд заметно уменьшиться, для этого и существуют MESA платы стоят они дороже чем PCI-parrport переходник.
4 Ответ от warik 2014-12-17 17:19:59
- warik
- Модератор
- Неактивен
- Зарегистрирован: 2014-12-08
- Сообщений: 36
Re: Погружение в LinuxCNC
2.3 HAL
Главная и самая интересная часть linuxcnc — Hardware Abstraction Layer. Это такая специальная прослойка которая позволяет обычному пользователю получать доступ к оборудованию(ядру) Linux. Раньше был ещё один HAL , который потом заменил проект udev , так вот это разные вещи, HAL Linuxcnc нужен только для linuxcnc.
Итак каждый компонент в HAL представлен черным ящиком с некоторым количеством ножек, каждая ножка обладает такими свойствами, как вход/выход а также тип передаваемого по ней сигнала. Ещё есть псевдо ножки, это константы, параметров компонента.
Все это похоже на блоксхемы и в итоге можно представить как вот такую вот схему(чем-то напоминает LabView, но увы удобного редактора нет).
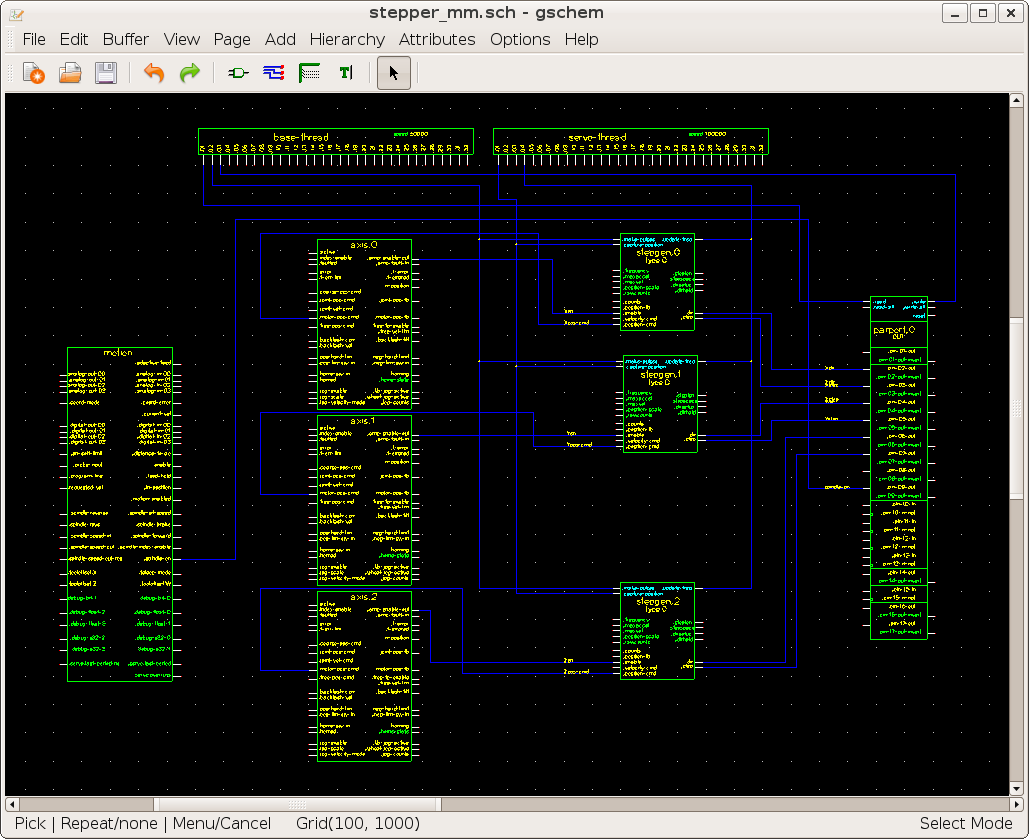
Ещё стоит заметить что в HAL всегда работают два типа компонентов ,работают они в разных потоках loadrt загружает компоненты работающие в real time потоке, loadusr загружает компоненты работающие не real time т.е. с периодом >=200 мс … это например интерфейс или джойстик подключенный по USB.
Также с помощью специального синтаксиса макросов и языка С, можно создавать свои компоненты, с помощью утилиты comp.
Также можно вручную вводить команды с помощью halcmd , с поддержкой автодополнения, ведь файлы с расширением .hal всего лишь сценарии написанные на этом языке.
Источник



