- Как в Linux посмотреть подключенные USB устройства
- Просмотр списка имен USB устройств с помощью команды df
- Список имен подключенных USB — устройств с помощью команды lsblk
- Список USB — устройств с помощью команды fdisk
- Список сведений о подключенных USB-устройствах с помощью команды lsusb
- Список USB контроллеров и устройств, использующих USB устройства
- Заключение
- Работа с usb видеокамерой в Linux. Часть 2
- Работа с usb видеокамерой в Linux. Часть 1
- Захват видео с USB камер на устройствах под управлением Linux
- Предыстория
- Ограничения
- HW и SW
- Предварительный анализ
- В поисках новых приключений
- Uvc2http
- Неожиданная проблема
- Другие проблемы и нюансы использования
- Результаты
- Использование
- Что дальше
Как в Linux посмотреть подключенные USB устройства
В настоящее время многие компьютерные периферийные устройства, такие как веб-камеры, мыши, сканеры, принтеры, жесткие диски, USB (Pendrive) подключаются по USB. После того, как эти устройства подключены к рабочему столу или серверу, важно знать имя устройства или путь к нему. Это помогает идентифицировать USB устройства для таких задач, как форматирование или отключение.
В Linux все файлы устройств хранятся в каталоге /dev и должны быть доступны во время загрузки системы.
В этой статье я покажу вам различные способы как в ubuntu посмотреть usb устройства. Большинство команд, упомянутых здесь, должны работать практически на всех дистрибутивах Linux. Например Ubuntu, Debian, Mint.
Просмотр списка имен USB устройств с помощью команды df
Команда df — это полезная команда, которая может помочь составить список всех подключенных томов, включая USB-накопители.
Как только USB-устройство подключается в систему Linux, это устройство автоматически монтируется в раздел /media и становится готовым к использованию.
Из приведенного выше вывода следует, что у меня есть 1 USB-накопитель /dev/sdb с 2 разделами /dev/sdb1 и /dev/sdb2
Список имен подключенных USB — устройств с помощью команды lsblk
Команда Lsblk используется для перечисления всех блочных устройств в системе Linux. Из списка можно фильтровать USB-устройства с помощью команды grep.
Чтобы получить дополнительную информацию, такую как UUID, производитель и тип файловой системы, используйте команду blkid, как показано на рисунке ниже.
Список USB — устройств с помощью команды fdisk
Вы можете использовать старую добрую команду fdisk, которая используется для разбиения томов на разделы, чтобы перечислить все разделы в системе Linux, включая USB-накопители.
Запятая будет отображать подробную информацию о вашем USB-томе, включая разделы , размер тома, секторы и тип файловой системы.
Список сведений о подключенных USB-устройствах с помощью команды lsusb
Команда lsusb, также известная как команда “List USB”, используется в Linux для перечисления всех USB-устройств, подключенных к системе.
На выводе выше отображается идентификатор шины, идентификатор устройства, идентификатор USB, а также поставщик или производитель USB-устройств
Команда lsusb перечисляет подключенные устройства и не предоставляет дополнительной информации о USB-устройствах.
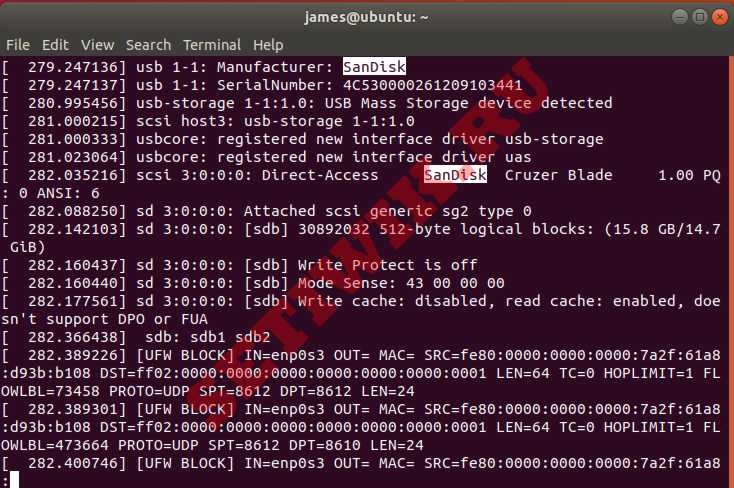
Для получения дополнительной информации о подключенных USB устройствах используйте команду dmesg. Команда dmesg, также известная как “сообщение драйвера” или “показать сообщение”, используется для проверки загрузочных сообщений. Кроме того, эта команда используется для отладки проблем, связанных с оборудованием и печати сообщений, генерируемых драйверами устройств.
Вы можете использовать команду dmesg и grep, чтобы сузиться до USB-устройств.
Кроме того, вы можете передать вывод команды dmesg в less для облегчения прокрутки.
На выходе вы можете найти определенную строку, нажав клавишу прямой косой черты ( / ) на клавиатуре, а затем имя или идентификатор устройства USB-устройства.
В моем случае я ищу дополнительную информацию о USB устройстве под названием SanDisk.
 Поиск USB-накопителя
Поиск USB-накопителя
Список USB контроллеров и устройств, использующих USB устройства
Команда usb-devices-это сценарий оболочки, который позволяет вам перечислить все USB-контроллеры и USB-устройства, подключенные к вашему компьютеру. Он печатает детали USB-устройства, такие как производитель, название продукта, серийный номер и многое другое. Вот вывод команды:
Заключение
В этой статье мы продемонстрировали различные способы просмотра USB-устройств, подключенных к системе Linux.
Источник
Работа с usb видеокамерой в Linux. Часть 2
Продолжаем цикл статей про программирование видеокамеры в Linux. В первой части [1], мы рассмотрели механизм открытия и считывания первичных параметров видеоустройства. Была написана простенькая утилита catvd. Сегодня расширим функционал нашей маленькой программы , но сначала надо написать обертку для функции ioctl.
Эта обертка позволяет прервать программу если была ошибка и показать сообщение.
  Попробуем считать картинку с камеры и сохранить в файл.
метод readFrame — отвечает за чтение и обработку полученого изображения.
методы initMMAP(), freeMMAP() — создание/очистка буфера памяти устройства.
методы startCapturing(), stopCapturing() — включение/выключение режима streaming у видеоустройства. Наличие этих функций, у камеры, можно проверить флагом V4L2_CAP_STREAMING [*].
  Разберем метод initMMAP
функция VIDIOC_REQBUFS [↓] позволяет проинициализировать буфер памяти внутри устройства. Структура v4l2_requestbuffers задает параметры инициализации
  После того, как буфер был проинициализирован, его надо отобразить на область памяти (mapping).
Функция VIDIOC_QUERYBUF [↓] позволяет считать параметры буфера, которые будут использоваться для создания memory-mapping области. Структура v4l2_buffer большая, опишу необходимые поля:
системная функция mmap() [3] позволяет отображать файл или область памяти устройств в оперативную память. Для использования mmap() необходимо подключить
  Далее необходимо переключить камеру в режим захвата.
Функция VIDIOC_QBUF [↓] ставит буфер в очередь обработки драйвером устройства. Поля используются такие же, как и для VIDIOC_REQBUFS или VIDIOC_QUERYBUF.
Функция VIDIOC_STREAMON[↓] включает камеру в режим захвата.
  Теперь камера включена и захватывает изображения. Но картинку еще надо получить.
Функция VIDIOC_DQBUF[↓] освобождает буфер из очереди обработки драйвера. В результате можем получить ошибку EAGAIN. Ничего опасного в этом нет, надо еще раз вызвать VIDIOC_DQBUF. Это происходит потому, что драйвер еще обрабатывает запрос и не может освободить буфер из очереди. При успешном выполнении этой функции, мы получаем в «руки» нашу картинку. В самом начале статьи, в коде был добавлен итератор. Итератор позволяет проследить сколько итераций вхолостую проходит цикл до успешного выполнения VIDIOC_DQBUF.
Вывод программы следующий
Из «iter == 831013» видно — картинка скидывается в буфер довольно долго. Для ускорения можно использовать несколько буферов и вытаскивать картинку с первого свободного и т.д.
  Сегодня была рассмотрена инициализация буфера памяти и чтения из него картинки. Изображение сохраняется в raw формате. Можно открыть программой Shotwell. В следующей статье будет рассмотрен вывод изображению в текстуру (через SDL2), затронуты некоторые форматы изображения и настройки камеры.
Источник
Работа с usb видеокамерой в Linux. Часть 1
По популярности видеокамера, сегодня, стоит в одном ряду с микрофоном и наушниками. Она используется в различных направлениях, таких как распознавание объектов, дополненная реальность, видеоконференции и множество других. Но что же скрыто под капотом этих сложнейших программ? Как мы получаем картинку с видеокамеры? Этот цикл статей позволит взглянуть на простоту работы с видеокамерой на низком уровне, обработку полученного изображения.
Для начала, немного информации о работе с устройствами в системе Linux. Устройства в nix системах представляют собой файл. С некоторыми файлами-устройств мы можем работать как с обычными файлами. Например:
эта команда выведет на экран весь диск sda.
Есть устройства с которыми нельзя работать напрямую, к ним относится видеокамера.При попытке это сделать мы получим такую реакцию системы:
*Где /dev/video0 это файл-устройство найшей видеокамеры.
Для работы с ней нам понадобится системная функция ioctl детальнее о ней можно ознакомится [1]. Попробуем это применить. Вот код позволяющий считать информации с устройства (альтернатива команде cat для видеоустройств):
В первых строках кода считываются параметры с которой запущено приложение. Если параметров нету то device_name принимает стандартоне значение «/dev/video0».
В блоке «Open Device» происходит открытие устройства системной функцией open (нужно подключить header fcntl.h). Обязательный параметр O_RDWR отвечает за открытие устройства считывания/записи. Если при подключении возникла ошибка, то функция open вернет -1.
Блок «Read Params From Device» — это сердце нашей маленькой программы. Для его использования надо подключить билиотеку возможно прийдется её установить, у каждого дистрибутива свой пакет под эту библиотеку
Системная функция ioctl имеет три параметра:
file_device — дескриптор нашего устройства
VIDIOC_QUERYCAP — функция ядра, которую применяем для нашего устройства.
device_params — область памяти куда будет сброшен результат функции «VIDIOC_QUERYCAP».
device_params это структура состоящая из таких полей:
если возникла ошибка ioctl вернет -1
Блок «Close Device» закрывает дескриптор устройства.
Посмотрим программу в действии.
устройство не определилось ядром либо не подключено уборщица опять ненужные провода дергала.
Подключаем и заново запуск. Получаем такую информацию:
поле capabilities и device capabilities можно расшифровать благодаря константам из файла videodev2.h:
На этом вводная статья заканчивается. В следующих обзорах будут затронуты, такие темы как memory-mapping, виодеформаты изображения, настройка камеры, вывод изображения в текстуру, работа с несколькими камерами.
Источник
Захват видео с USB камер на устройствах под управлением Linux

Предыстория
- Видео в разрешении FullHD (1920Х1080) или HD (1280х720) и нормальная частота кадров (чтобы можно было играть).
- Игрушку я планировал отдать детям, поэтому нужен был автостарт и поддержка подключения/отключения камеры.
В общем хотелось что-то вроде этого:
Ограничения
Я не собирался искать решение, которое работает всегда и везде. Следующие ограничения меня вполне устраивали:
- Хороший WiFi сигнал.
- Ограниченное число подключений, приоритет отдавался случаю, когда есть всего один клиент.
- Камера поддерживает режим MJPG.
HW и SW
Предварительный анализ
Код UVC драйвера оказался готов к добавлению различного рода “специальных” решений, и я легко нашел место, где надо скорректировать размер буфера (функция uvc_fixup_video_ctrl()). Более того, драйвер поддерживает набор quirks, которые позволяют поддерживать камеры с разного рода отклонениями от стандарта UVC. В общем, разработчики драйвера сделали лучшее, что возможно для поддержки зоопарка камер.
Добавив коррекцию размера буфера, я получил стабильную работу в режиме 1280х720 и даже в режиме 1920х1080. Ура! Половина задачи решена!
В поисках новых приключений
Немного порадовавшись первой удаче, я вспомнил, что mjpg-streamer далек от совершенства. Наверняка можно сделать что-то простое, не такое универсальное как mjpg-streamer, но более подходящее для моих условий. Так я решил сделать uvc2http.
В mjpg-streamer мне не понравилось использование нескольких потоков и копирование буферов. Это определило архитектуру решения: 1 поток и никакого копирования. Используя non-blocking IO, это делается достаточно просто: захватываем кадр и без копирования отсылаем его клиенту. Есть небольшая проблема: пока мы отсылаем данные из буфера, мы не можем вернуть буфер обратно в очередь. А пока буфер не в очереди, драйвер не может положить в него новый кадр. Но если размер очереди > 1, то это становится возможным. Число буферов определяет максимальное количество подключений, которое можно гарантированно обслуживать. Т.е., если я хочу гарантированно поддерживать 1 клиента, то 3-х буферов достаточно (в один буфер пишет драйвер, из второго отсылаем данные, третий в запасе, чтобы избежать конкуренции с драйвером за буфер при попытке получить новый кадр).
Uvc2http
Uvc2http состоит из двух компонентов: UvcGrabber и HttpStreamer. Первый отвечает за получение буферов (кадров) из очереди и возврат их обратно в очередь. Второй отвечает за обслуживание клиентов по HTTP. Есть еще немного кода, который связывает эти компоненты. Подробности можно посмотреть в исходниках.
Неожиданная проблема
Все было замечательно: приложение работало и в разрешении 1280х720 выдавало 20+ кадров/сек. Я делал косметические изменения в коде. После очередной порции изменений я замерил частоту кадров. Результат был удручающий — меньше 15 кадров. Я бросился искать, что же привело к деградации. Я потратил, наверное, 2 часа в течение которых частота уменьшалась с каждым замером до значения 7 кадров/сек. В голову лезли разные мысли о деградации из-за долгой работы роутера, из-за его перегрева. Это было что-то непонятное. В какой-то момент я отключил стримминг и увидел, что просто один захват (без стримминга) давал те же 7 кадров. Я даже начал подозревать проблемы с камерой. В общем какая-то чушь. Дело было вечером и камера, повернутая в окно, показывала что-то серое. Дабы сменить мрачное изображение я повернул камеру внутрь комнаты. И, о чудо! Частота кадров увеличилась до 15 и я все понял. Камера автоматически подстраивала время экспозиции и в какой-то момент это время стало больше длительности кадра при заданной частоте. За эти два часа случилось следующее: сначала плавно темнело (это был вечер), а потом я повернул камеру внутрь освещенной комнаты. Направив камеру на люстру я получил 20+ кадров/сек. Ура.
Другие проблемы и нюансы использования
Результаты
Ниже табличка с результатами сравнения mjpg-streamer и uvc2http. Если коротко — есть значительный выигрыш в потреблении памяти и небольшой выигрыш в частоте кадров и загрузке CPU.
| 1280×720 | 1920×1080 | |||||||||||
| VSZ, KB, 1 client | VSZ, KB, 2 clients | CPU, %, 1 client | CPU, %, 2 clients | FPS, f/s, 1 client | FPS, f/s, 2 clients | VSZ, KB, 1 client | VSZ, KB, 2 clients | CPU, %, 1 client | CPU, %, 2 clients | FPS, f/s, 1 client | FPS, f/s, 2 clients | |
| Mjpg-streamer | 16860 | 19040 | 26 | 43 | 17.6 | 15 | 25456 | 25812 | 28 | 50 | 13.8 | 10 |
| uvc2http | 3960 | 3960 | 26 | 43 | 22 | 19.6 | 7576 | 7576 | 28 | 43 | 15.5 | 12.2 |
Ну и конечно же видео, которое я сделал вместе с детьми:
Фото получившегося танка (получилось что-то вроде цыганской телеги):
Использование
Исходники находятся здесь. Для использования на PC Linux надо всего лишь собрать (при условии что вы не хотите патчить драйвер UVC). Утилита собирается с помощью CMake стандартным способом. Если же надо использовать в OpenWRT, то надо сделать дополнительные шаги:
- Скопировать содержимое директории OpenWrt-15.05 в корень репозитория OpenWRT. Эти файлы только для OpenWRT 15.05. Они описывают новый пакет для OpenWRT и патч для драйвера UVC.
- Если ваша камера также возвращает завышенный размер необходимого буфера, то надо добавить использование quirk UVC_QUIRK_COMPRESSION_RATE для вашей камеры в файле uvc_driver.c. Для этого надо сделать собственный патч для драйвера UVC. Как это сделать, описано здесь wiki.openwrt.org/doc/devel/patches. Вам необходимо добавить описание вашей камеры в массив uvc_ids. В качестве примера можно посмотреть на описание моей камеры:
Что дальше
Решение состоит из двух частей: патч драйвера и другой алгоритм стримминга. Патч драйвера можно было бы включить в новую версию ядра линукса, но это спорное решение, так как оно основано на предположении о минимальном коэффициенте сжатия. Утилита же, на мой взгляд, хорошо подходит для использования на слабых системах (игрушках, домашних системах видеонаблюдения), и ее можно немного улучшить, добавив возможность задавать настройки камеры через параметры.
Алгоритм стримминга можно улучшить так как есть запас по загрузке CPU и по ширине канала (я легко получал с роутера 50+ MBit подключая десяток клиентов). Также можно добавить поддержку звука.
Источник



