- Заметки о Linux, электронике, радиолюбительстве
- воскресенье, 27 июля 2014 г.
- Работа с последовательным портом из консоли Linux
- Working with the serial console
- Contents
- Configure console access on the target machine
- Boot loader
- GRUB Legacy
- rEFInd
- Syslinux
- Kernel
- getty
- Making Connections
- Connect using a terminal emulator program
- Command line
- And, for Windows
- Graphical front-ends
- Installing Arch Linux using the serial console
- Debugging an unresponsive machine using a serial console
- Troubleshooting
- Ctrl+c and Minicom
- Resizing a terminal
- Missing ports on multi-port expansion cards
- Посоветуйте Serial port terminal
- minicom, GtkTerm.
- Кунг-фу стиля Linux: разбираемся с последовательными портами
- Всё — это файл — до тех пор, пока это не так
- Подробности о socat
- Проблема
- Клиент
- Тестирование
- Почему всё так нескладно?
Заметки о Linux, электронике, радиолюбительстве
Личный блог Вадима Кузнецова, RA3XDH
воскресенье, 27 июля 2014 г.
Работа с последовательным портом из консоли Linux
В предыдущем посте было показано как запустить UART на отладочной плате Launchpad для MSP430. Теперь рассмотрим как общаться с платой при помощи средств командной строки Linux. Используется плата с прошивкой из предыдущего поста. Для подробностей — см. под кат
Как известно, все устройства последовательных портов представлены файлами устройств в каталоге /dev.Через эти файлы и происходит общение ОС Linux с внешним устройством на последовательном порту. Чтобы передать что-то на внешнее устройство нужно записать данные в файл устройства, а чтобы считать информацию из устройства — прочитать данные из файла устройства. Это можно делать при помощи команд cat и echo так же как для обычных файлов на диске. Или внутри программы на С при помощи вызовов ioctl(), read() и write() или библиотеки termios.
Физическим последовательным портам RS232, к которым подключались диалапные модемы на старых компьютерах, соответствуют файлы устройств /dev/ttyS*, начиная с /dev/ttyS0. Виртуальным последовательным портам, которые создаются различными конвертерами USB UART соответствуют файлы устройств /dev/ttyUSB* и /dev/ttyACM*. Ядро Linux автоматически разпознаёт подключенное устройство, загружает для него драйвер и создаёт файл устройства. Вручную устанавливать драйвер, как в ОС Windows не требуется. Например, если подключить к USB преобразователь USB UART FT232, то создаётся файл устройства /dev/ttyUSB0, с которым можно работать также как и с обычным последовательным портом. На плате Launcpad находится микросхема TUSB3410, которая тоже представляет собой конвертер USB UART. Если подключить её к USB, то создаётся файл устройства /dev/ttyACM0. Чтобы общаться с платой нужно что-либо писать/читать с этого файла.
Чтобы пользователь мог читать или писать в файл устройства последовательного порта, его нужно добавить в группу dialout. Иначе работать с последовательным портом сможет только администратор root.
Простейшим приложением с графическим интерфейсом, которое работает с последовательным портом, является CuteCOM. Он обычно уже есть в вашем дистрибутиве Linux. Его можно установить из репозиториев. При помощи CuteCOM мы работали с платой в предыдущем посте. Выглядит CuteCOM вот так:
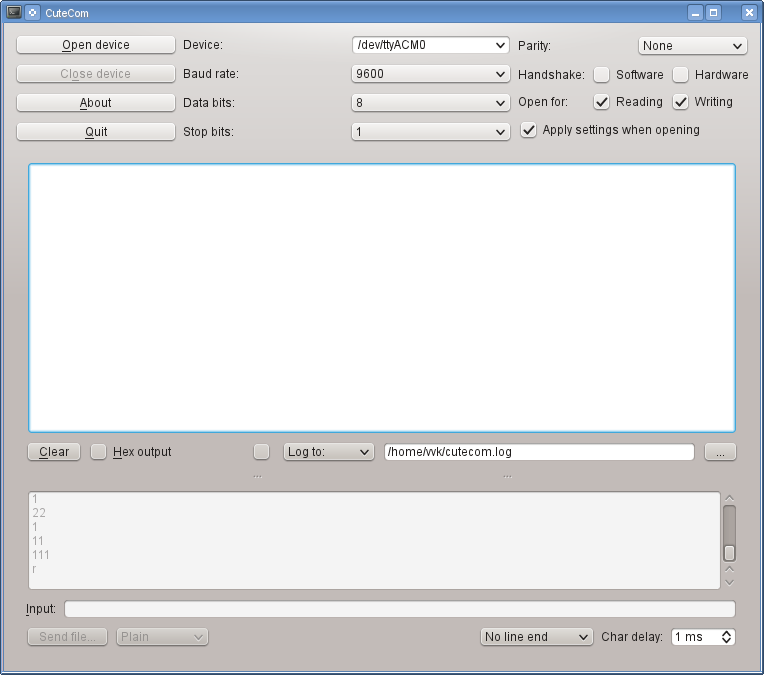
Работать с ним крайне просто. Указываем нужное устройство, если его нет в списке, то его можно впечатать вручную. Затем указываем скорость и параметры и нажимаем OpenDevice. В окне видим данные, которые пришли от устройства. В поле ввода в нижней части можем печать строку символов, которые предаются на устройство. Чтобы передать данный нажимаем Enter и смотрим ответ устройства в окне.
Теперь рассмотрим как работать с COM-портом из командной строки. Для этого служат три команды: stty, cat и echo.
Команда stty устанавливает параметры и скорость COM-порта. Её формат:
stty -F
Чтобы установить параметры для платы Launchpad для соединения на скорости 9600 нужно выполнить:
$ stty 9600 -F /dev/ttyACM0 raw -echo
Параметр raw устанавливает, что данные в компьютер передаются байт за байтом так же как приходят в порт без преобразований. Аппаратное управление потоком отключено. Подробнее о том, что включает и выключает raw — см. man stty. Если не включить raw, то скорее всего ничего работать не будет.
Теперь в той же консоли нужно набрать
$ cat /dev/ttyACM0
И можно смотреть данные, которые приходят от платы. Выход — нажать Ctrl+C.
Теперь нажимаем на плате RESET и видим, что в консоди напечатался текст.
Чтобы передать в плату данные, в другой консоли нужно использовать команду echo и перенаправление вывода в файл устройства. Наберём в другой консоли:
$ echo "1">/dev/ttyACM0
Видим, что на плате загорелся красный светодиод и в первой консоли было выдано сообщение об этом. Чтобы убрать конец строки в передаваемых данных, то нужно использовать запуск echo -n, а чтобы интерпретировать 16-ричные коды — нужно echo -e. Ключи можно комбинировать.
В итоге должно получиться так:

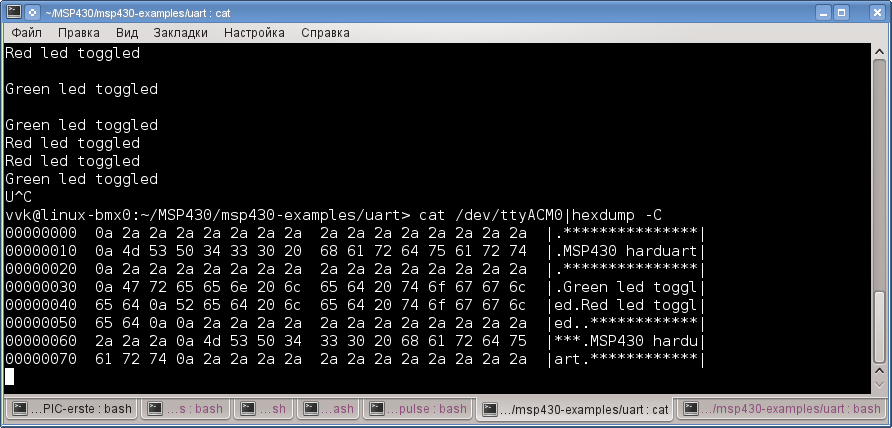
Чтобы увидеть 16-ричные коды данных, приходящих от устройства, нужно использовать команду hexdump:
$ cat /dev/ttyACM0|hexdump -C
Получится вот так:
Чтобы иметь вывод данных от устройство на экран и в текстовый файл нужно использовать tee:
Источник
Working with the serial console
An Arch Linux machine can be configured for connections via the serial console port, which enables administration of a machine even if it has no keyboard, mouse, monitor, or network attached to it.
Installation of Arch Linux is possible via the serial console as well.
A basic environment for this scenario is two machines connected using a serial cable (9-pin connector cable). The administering machine can be any Unix/Linux or Windows machine with a terminal emulator program (PuTTY or Minicom, for example).
The configuration instructions below will enable boot loader menu selection, boot messages, and terminal forwarding to the serial console.
Contents
Configure console access on the target machine
Boot loader
When using GRUB with a generated grub.cfg , edit /etc/default/grub and enable serial input and output support:
Next add the GRUB_SERIAL_COMMAND variable and set the options for the serial connection. For COM1 ( /dev/ttyS0 ) with baud rate of 115200 bit/s:
Read GRUB’s manual on Using GRUB via a serial line and the serial command for detailed explanation of the available options.
GRUB Legacy
Edit the GRUB Legacy configuration file /boot/grub/menu.lst and add these lines to the general area of the configuration:
rEFInd
rEFInd supports serial console only in text mode. Edit refind.conf and uncomment textonly .
Syslinux
To enable serial console in Syslinux, edit syslinux.cfg and add SERIAL as the first directive in the configuration file.
For COM1 ( /dev/ttyS0 ) with baud rate of 115200 bit/s:
The serial parameters are hardcoded to 8 bits, no parity and 1 stop bit.[1]. Read Syslinux Wiki:Config#SERIAL for the directive’s options.
Kernel
Kernel’s output can be sent to serial console by setting the console= kernel parameter. The last specified console= will be set as /dev/console .
getty
At boot, systemd-getty-generator(8) will start a getty instance for each console specified in the kernel command line.
If you have not configured console= in kernel command line start serial-getty@device.service . For /dev/ttyS0 (COM1) that would be serial-getty@ttyS0.service . Enable the service to start it at boot.
Unless specified otherwise in the kernel command line, getty will be expecting 38400 bit/s baud rate, 8 data bits, no parity and one stop bit-times.
Making Connections
Connect using a terminal emulator program
Perform these steps on the machine used to connect the remote console.
Command line
dterm
dterm AUR is a tiny serial communication program. If you invoke it without parameters, it will connect to /dev/ttyS0 at 9600 baud by default. The following example connect to /dev/ttyS0 at 115200 baud, with 8 data bits, no parity bit and 1 stop bit-times:
See its homepage[2] for more examples.
Minicom
minicom can be obtained from the official repositories. Start Minicom in setup mode:
Using the textual navigation menu, change the serial port settings to the following:
Press Enter to exit the menus (pressing Esc will not save changes). Remove the modem Init and Reset strings, as we are not connecting to a modem. To do this, under the Modem and Dialing menu, delete the Init and Reset strings. Optionally save the configuration by choosing save setup as dfl from the main menu. Restart minicom with the serial cable connected to the target machine. To end the session, press Ctrl+A followed by Ctrl+X .
picocom
picocom is a tiny dumb-terminal emulation program that is very like minicom, but instead of mini, it is pico. The following example connect to ttyS0 at 9600 bps:
See its manual for detailed usage.
Screen
GNU Screen is able to connect to a serial port. It will connect at 9600 baud by default:
A different baud rate (e.g. 115200) may be specified on the command line.
To end the session, press Ctrl+a followed by K . Alternatively, press Ctrl+a , type :quit and confirm it by pressing Enter .
Serialclient
Serialclient[3] is a CLI client for serial connection written in ruby. Install ruby package, then install it with the following:
Then, you can use like this:
And, for Windows
On Windows machines, connect to the serial port using programs like PuTTY[4] or Terminalbpp[5].
Graphical front-ends
cutecom AUR is another gui enabled serial monitor.
putty is also available for Linux.
moserial is a gtk-based serial terminal, primarily intended for technical users and hardware hackers who need to communicate with embedded systems, test equipment, and serial consoles.
Installing Arch Linux using the serial console
- Connect to the target machine using the method described above.
- Boot the target machine using the Arch Linux installation CD.
- When the bootloader appears, select Boot Arch Linux () and press Tab to edit
- Append console=ttyS0,115200 and press Enter .
- Now systemd should detect ttyS0 and spawn a serial getty on it. Login as root and start the installation as usual.
Debugging an unresponsive machine using a serial console
Even though [7] has only raw and terse instructions, it presents the full scene. It is important to note that here, the machine under test got unresponsive in a reproducible manner. And that it happened during normal operation. So it could be accessed normally before it needed debugging. However, in general, the serial console is also useful for debugging boot issues. Perhaps by configuring the boot loader by hand at machine startup time. Also note the mentioned netconsole within the P.S paragraph of the external link from this section.
Troubleshooting
Ctrl+c and Minicom
If you are having trouble sending a Ctrl+c command through minicom you need to switch off hardware flow control in the device settings ( minicom -s ), which then enables the break.
Resizing a terminal
Unlike ssh, serial connections do not have a mechanism to transfer something like SIGWINCH when a terminal is resized. This can cause weird problems with some full-screen programs (e.g. less ) when you resize your terminal emulator’s window.
Resizing the terminal via stty is a workaround:
However, this requires you to manually input the proper geometry. The following methods should be simpler.
1. There is a lesser-known utility called resize , shipped with xterm , that can solve this problem. Invoke it without parameters after you resize the terminal emulator’s window:
2. If you do not want to install xterm, it is possible to do the same work via a shell function. Put the following function into your zshrc and invoke it without parameters after resizing the terminal emulator’s window:
Missing ports on multi-port expansion cards
 This article or section needs expansion.
This article or section needs expansion.
The number of serial ports using the generic 8250 driver on the default kernel configuration is set to 4 at runtime with a maximum of 32. This will prevent the creation of /dev/ttyS4 and above. Counting the typical built in serial port on the motherboard this prevents the use of the 4th serial port on a 4 port expansion card.
Источник
Посоветуйте Serial port terminal
Сабж, в данный момент пользую это, но хотелось бы что-то более удобное.

minicom ищете? И что подразумевается под «более удобное»?

телепаты в отпуске, так что требования предъявляйте самостоятельно
Нет, не оно. Под более удобное, что бы меньше зависимостей, без GUI.
по ссылке не ходи @ сразу посылай
миником и так без гуи, из зависимостей
screen /dev/ttyUSB0 9600
если надо еще меньше зависимостей, то это только из /dev/tty0 читать-писать

minicom, GtkTerm.
GtkTerm не развивается, имеет ряд неисправленных ошибок. Так что рекомендую осилить minicom.

Есть очень минималистичный picocom.

> миником и так без гуи
Уродский «псевдооконный» интерфейс в консоли ничем не лучше гуя. И вообще миником корявый и не unix-style.
Можно без ncurses, например kermit. Много лет пользуюсь именно им и доволен как слон.
Еще можно клепать перлоскрипты под конкретную задачу на Device::SerialPort + Term::Readline. В них легко делать дополнение по табу, цветной вывод и кучу других полезных фич. История и редактирование в стиле vim/emacs прилагается.
Источник
Кунг-фу стиля Linux: разбираемся с последовательными портами
Раньше последовательные порты были буквально повсюду. И они, в каком-то смысле, никуда и не делись, так как многое, что подключается к компьютеру по USB, на самом деле, выглядит для системы как последовательный порт. Проблема тут заключается в том, что в наши дни всё в мире завязано на компьютерные сети. Конечно, можно купить терминальный сервер, который преобразует последовательный порт в интерфейс Ethernet. Но это совсем не интересно. Здесь я хочу рассказать о том, как пробрасывать последовательные порты по сети с использованием существующих Linux-инструментов. Решение это не идеальное, оно оказывается работоспособным далеко не всегда, но если оно работает, то работает оно хорошо.

Всё — это файл — до тех пор, пока это не так
Когда-то в прошлом ОС Unix — прародитель Linux — практически всё считала файлом. Все файлы были созданы более или менее равными. Программы не заботило то, с чем именно им приходилось работать: с локальными файлами, с файлами, доступными по сети, с файлами, считанными с ленточного накопителя, или с файлами, прибывшими по именованному каналу.
Но ситуация начала меняться. Несмотря на то, что в Linux последовательный порт — это просто файл, у него имеются некоторые особые атрибуты, которые позволяют, например, задать скорость порта в бодах. И, что ещё хуже, некоторые программы слишком много «знали» о файлах и настоятельно требовали придерживаться определённых соглашений по их именованию. Поэтому, в теории, у пользователя должна была быть возможность создать сетевой сокет и подключить один из его концов к последовательному порту, а другой — к программе. После этого всё должно было нормально работать. Но это — в теории.

Переходник USB/последовательный порт
Практика, конечно, отличается от теории. В некоторых случаях, очень простых, это может и сработать. Для настройки вышеописанной схемы работы с последовательными портами можно воспользоваться утилитой socat (это — нечто вроде cat для сокетов). Но если программа, которую мы пытаемся таким образом обмануть, попробует, например, задать скорость порта в бодах, то у неё, вероятно, ничего не получится. А некоторые программы даже не распознают такой вот ненастоящий последовательный порт.
Подробности о socat
Программа socat напоминает волшебный кабель-переходник, который просто передаёт на выход всё, что поступает на его вход, и, кроме того, поддерживает передачу данных в обратном направлении. Программа может читать данные из файлов, из каналов, с различных устройств, из сокетов и из некоторых других мест. Например, может понадобиться создать простой TCP-прокси для перенаправления соединений с одного локального хоста на другой хост. С помощью socat решить эту задачу очень просто:
То, что получится в результате выполнения этой команды, поддерживает лишь одно соединение. Но socat можно настроить так, чтобы для новых соединений создавались бы форки, что позволяет обрабатывать множество запросов.
Проблема
Правда, если попытаться применить socat для работы с последовательным портом, то получившаяся конструкция вряд ли будет работать без множества дополнительных настроек. Но нужно это так часто, что существует несколько программ, способных нам в этом помочь. В большинстве Linux-дистрибутивов заработает программа ser2net , которая умеет преобразовывать последовательный порт в сокет. Если ser2net кому-то не подойдёт — можно воспользоваться Python-кодом, который имеется среди примеров использования библиотеки pyserial . Правда, та версия pyserial , которая установлена в используемом дистрибутиве, может оказаться слишком старой для поддержки этого кода. Если это так и есть — нужно установить эту библиотеку в обход системного менеджера пакетов, например, воспользовавшись pip .
Далее я исхожу из предположения о том, что для работы с последовательным портом используется ser2net .
Эта утилита обычно устанавливается в виде системной службы, для её настройки можно прибегнуть к редактированию файла /etc/ser2net.conf . Я убрал из этого файла всё, что там было, и добавил туда описания двух нужных мне последовательных портов, указав, кроме прочего, их желаемую скорость в бодах:
После редактирования этого файла сервис надо перезапустить (вероятно, тут подойдёт команда systemctl restart ser2net ; а если она не сработает в первый раз — её стоит попробовать выполнить ещё раз, так как иногда она пытается запустить новую копию сервиса ещё до того, как предыдущая копия полностью завершила работу).
Для целей отладки может понадобиться остановить сервис и запустить его, включив возможность вывода отладочных сообщений:
Но, в любом случае, после того, как сервер заработает, указанные порты (7777 и 7778 в моём конфигурационном файле) будут работать как соответствующие последовательные порты.
Хочу сделать тут несколько замечаний. Если вы пытаетесь проделать это с 3D-принтером, и если у вас запущено нечто вроде Octoprint, то вам понадобится или закрыть программу, или найти другой способ «отвязать» её от принтерного порта до выполнения вышеописанных настроек. Это применимо к любой программе, удерживающей последовательный порт, который нам нужно открыть. В случае с некоторыми стандартными портами нужно удостовериться в том, что механизм входа в систему не удерживает порт открытым, ожидая пользователя. То, как именно это всё заработает, зависит от конкретной системы. То же самое относится и к файрволу. Если прослушивается порт 7777 и при этом используется файрвол, нужно настроить его так, чтобы он разрешал бы подключения к этому порту. При этом надо помнить о том, что для открытия портов с небольшими номерами обычно нужны root-права.
Клиент
На стороне клиента можно использовать socat , но некоторые программы поймут, что перед ними — не настоящий последовательный порт. Правда, никто не мешает попробовать такую команду:
Кое-какие программы, правда, ищут устройства лишь в папке /dev . Если это именно так — понадобится запустить socat с root-правами (воспользовавшись sudo ), а затем нужно будет настроить /dev/ttyNET0 , дав разрешения на чтение и запись (например — sudo chmod 666 /dev/ttyNET0 ).
Тестирование
Если созданный механизм выглядит работоспособным, я, всё равно, не рекомендую сразу же пробовать пользоваться им в программе, для которой он создавался. Советую сначала протестировать его, воспользовавшись чем-то вроде picocom . После запуска socat , например, на клиентской машине должна нормально отработать такая команда:

Утилита picocom может обмениваться данными по сети с использованием виртуального последовательного порта
Если вы попробуете сделать нечто подобное, то вам, понятно, нужно будет указать актуальные для вашей системы имя и скорость порта. У вас, в результате, должна появиться возможность обмениваться данными с удалённым устройством. Если это не получится — нужно разобраться с причинами неполадки до того, как виртуальный порт можно будет использовать в обычной программе. Если в основе вашего последовательного устройства не лежит передача текста, то, возможно, вам больше повезёт с cutecom. Но, к сожалению, эта программа знает о том, что виртуальный последовательный порт — это порт поддельный, и не позволит его выбрать. Правда, программа это опенсорсная, поэтому не слишком сложно будет создать её собственную версию, которая примет любое нужное имя устройства. Конечно, есть и другие варианты. Например — выбрать ненастоящий последовательный порт позволит gtkterm .
Если в ходе тестирования возникнет ошибка протокола, может оказаться так, что последовательный порт перемещён (например — был /dev/ttyUSB0 , а потом стал /dev/ttyUSB1 ), или окажется, что неправильно настроена скорость порта. Сообщения об ошибках не особенно информативны, но при поиске проблем стоит помнить об опции -d программы ser2net .
Документация программы ttynvt устроена просто, но отличается точностью
Когда же дело дойдёт до использования виртуального последовательного порта в обычной программе, всё может заработать как надо. Но может появиться ошибка, или, в некоторых случаях, программа может не позволить выбрать соответствующий файл, так как он не ассоциирован с настоящим последовательным портом. Иногда бывает так, что в чём-то просто не везёт. Правда, тут может пригодиться более интеллектуальный клиент, который знает толк в последовательных портах. Например — ttynvt. Программу, возможно, придётся собрать из исходников, но сделать это очень просто. Она зависит от libfuse , но больше ей ничего особенного не нужно.
После того, как программа будет готова к работе — попробуйте нечто вроде такой команды:
Будет создано устройство /dev/ttyNET0 (отсюда — и потребность в root-правах). В моей системе у нового устройства были права на чтение и запись root-уровня, оно входило в группу dialout . Если вы воспользуетесь этой программой, то вам, возможно, нужно будет проверить и настроить под себя её разрешения.
Перед использованием в обычной программе то, что получилось, опять же, рекомендуется протестировать с помощью picocom . А во время проведения теста стоит скрестить пальцы и надеяться на удачу.
Почему всё так нескладно?
Я, когда связался с последовательными портами, хотел сделать так, чтобы программа Lightburn для лазерного резака работала бы на мощной машине с использованием удалённого рабочего стола. Мне хотелось, чтобы резак был бы подключён к USB-порту на простом локальном компьютере, и чтобы программа взаимодействовала бы с поддельным портом в более серьёзной системе.
Но, к сожалению, сейчас ситуация такова, что Lightburn — программа слишком умная, которая не ведётся на мои хитрости и не хочет показывать мне виртуальные последовательные порты. И нет известного мне способа заставить её использовать имя файла, выбранное мной. Поэтому я даже не могу проверить то, как она работает с виртуальным портом. Правда, мне удалось протестировать подобные порты с некоторыми другими G-Code-программами. И всё это работало хорошо. Я сообщил о моей проблеме разработчикам Lightburn. Возможно, в тот момент, когда вы это читаете, проблема уже решена.
Парадигма «всё — это файл» чрезвычайно мощна. Но, к сожалению, с каждым годом она всё меньше соответствует реальному положению дел. Это создаёт всё больше препятствий тем, кто хочет сделать в Linux что-то интересное и не совсем обычное. Но, как это обычно бывает в Linux, желаемого, всё равно, как-то можно достичь. Я не сомневаюсь в том, что смог бы отследить вызовы, которые выполняет Lightburn для открытия порта, а после этого смог бы найти способ обмануть программу и подсунуть ей последовательный клиент. Но я надеюсь, что делать этого мне не придётся.
Возникала ли у вас необходимость в работе с виртуальными последовательными портами в Linux?
Источник



