- Mission Planner
- Основные значения и параметры
- Панель управления
- Mission planner windows 10
- Mission Planner
- Similar choice
- Programs for query ″mission planner windows 10″
- Planner 5D
- EDraw Mind Map
- Room Arranger
- ALNO AG Kitchen Planner
- Garden Planner
- Box-Port Design
- pCon.planner
- ITN Converter
- OrCAD
- Sharp World Clock
- Mission planner для windows 10
- Скачать Mission Planner для ПК
- Mission Planner для ПК Скриншоты
- загрузить и установить Mission Planner на вашем персональном компьютере и Mac
- Шаг 1: Загрузите эмулятор Android для ПК и Mac
- Шаг 2: установите эмулятор на ПК или Mac
- Шаг 3: Mission Planner для ПК — Windows 7/8 / 8.1 / 10
- Шаг 4: Mission Planner для Mac OS
Mission Planner
Утилита обладает широким набором функций для настройки летательного аппарата. Вся информация отображает в основном окне в режиме реального времени.
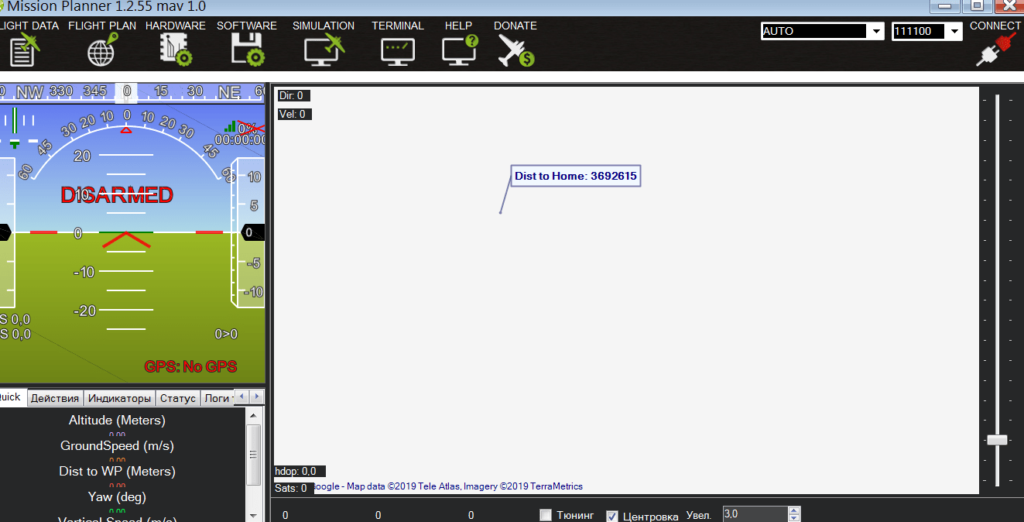
Основная задача программы Mission Planner заключается в том, чтобы оптимизировать работу летательного аппарата. Интерфейс программы на английском языке.
Основные значения и параметры
В главном меню программы можно посмотреть все основные параметры полета. Курс назначения имеет зеленый цвет, красная линия указывает на фактический курс. Пункт в меню GPS reported altitude говорит о высоте по информации GPS. Утилита обладает широким набором функций для настройки дрона. Вся информация отображает в основном окне в режиме реального времени. В процессе использования можно узнать долготу, широту, угол наклона, скорость движения, угол крена и другие значения.
Панель управления
Многие пользователи сталкиваются с ситуацией, когда угол наклона летательного аппарата сильно смещается вправо, а программа показывает горизонт влево. Программа в этом случае работает правильно, просто вам нужно проверить включен ли режим автопилота. Если выставить значение Fly-by-Wire или автомат, то программа начнет показывать верный наклон. Когда контроллер функционирует в режиме Manual, команды игнорируются и не выполняются. Для внесения соответствующих корректировок выберите значение HUD. Стоит отметить, что пользователи могут управлять дроном без использования пульта дистанционного управления.
Mission planner windows 10
Most people looking for Mission planner windows 10 downloaded:
Mission Planner
With Mission Planner you can point-and-click waypoint entry, using Google maps.
Similar choice
Programs for query ″mission planner windows 10″
Planner 5D
This app helps you create home design and interior decor in 2D and 3D without any special skills.
EDraw Mind Map
Edraw Mind Map is a free mind map freeware with rich examples and templates which make it easy to create mind maps .
. timeline, life planner, SWOT analysis .
Room Arranger
Room Arranger is 3D room / apartment / floor planner with simple user interface.
. / apartment / floor planner with simple .
ALNO AG Kitchen Planner
Kitchen Planner is an individual 3D planning aid that allows you to plan your dream kitchen in 3D and move around the virtual room.
Kitchen Planner is an . and place windows and doors .
Garden Planner
Garden Planner is a garden and landscaping design tool. It lets you create plans and arrange plants, trees, buildings, and objects on them.
Garden Planner is a garden . them. Garden Planner includes a library .
Box-Port Design
It is intended to be uncomplicated (even for the beginner), but genuinely helpful to anyone building a subwoofer or doudspeaker.
. -in Box Planner can quickly .
pCon.planner
pCon.planner is your program for spatial and interior planning! By way of sophisticated tools, you can create complete 3D room and furnishing concepts.
pCon.planner is your . as insert windows, doors, wallpaper .
ITN Converter
ITN Converter is both a route converter supporting many formats, and a simple and efficient route planner.
. efficient route planner. The converter .
OrCAD
Industry-proven OrCAD solutions are available as standalone products or in comprehensive suites.
. FPGA System Planner: Provides a complete .
Sharp World Clock
Sharp World Clock provides multiple analog or digital clocks on your Windows desktop.
. on your Windows desktop. Each . , and meeting planner, along with .
Mission planner для windows 10
meee1 released this Aug 28, 2020
UAVCAN update, bps stats, performance
Drawing: change name
MAVLinkInterface: add banner request on open
SLN: cleanup
ObjectListView: add
Skia winforms: add
MP.Drawing
WindowsStore: version
Proximity: add OBSTACLE_DISTANCE
GeoidHeightsDotNet: add
Xamarin.Forms.Platform.WinForms: add
zlib: add
GLControl: Add
MPLib
Drawing: split libs
wasm: drawing fix
MissionPlanner: remove application insights
Drawing: open snk change
SLN: update
Core: update
Lib: Add
Video: OnNewImage pass bitmap
WebCamService: use local directshowlib
DirectShowLib: add
OpticalFlow: using fix
Github Action: add debug build
AltitudeAngel — catch bug crashes with invalid WebBrowser()
LogMap: update using
WebCam: null check
Drawing: update
Xamarin: update
BSE.WinForms: remove designer deps
ConfigRawParam: cleanup
ZedGraph: remove print
Common: ignore icon
Program: remove depreciated code
drivers: update version
px4uploader: pad firmware % 4
Drivers: cube — px4
CaptureMJPEG: ubuntu fix #2436
plugin generator: only show on message
Plugin: example rename
ConfigAdvanced: fix text alignment
MainV2: exception handle
Xamarin: change layout
MainSwitcher: replace existing if duplicate add
GStreamer: fix ubuntu gstreamer #2437
Generator: fix scale
Mavlink: upstream update
generator: update
CurrentState: add gen_runtime gen_maint_time
Gstreamer: update gstreamer version
PluginThread: pump message loop while waiting
srtm: lock cache on add
OpenGLtest2: es20, add lines, tweaks
Ntrip: auto can node if
OpenGLtest2: shader based fog
HUD: null check message
CurrentState: add messageHigh log
OpenGLTest: make shared context work under mesa3d #2430
Mainv2: fix adsb speed #2433
HUD: init strings
QuickView: use Equals, fixs nans
MavlinkUtils: improve StructureToByteArray to size array so marshal does not fail
MainV2: add mavftp param logging to tlog as gcs
Mavlink: xml update
OpenGLTtest2: remove loadmatrix/update shaders
FlightData: lower update rate when not connected
ElevationProfile: fix terrain display
mavcmd: add delay for rover #2269
example8: ensure enabled if connected
DisplayView: add custom
Settings: order config
LogBrowse: full mavgraph support
mavcmd: add yaw_speed #2427
LogBrowse: add unit graph
DFLogBuffer: add null check for bad log
ConfigHWCompass2: remove 0 prio’s (this could cause a reorder if prio1/2/3 is 0 and devid4+ exists)
MAVFtp: add logging
ConfigPlanner: fix default state for reset on connect
GimbalPoint: fix param name
FlightData: seperate exception handler
ConfigHWCompass2: fix missing compass message when devid = 0
Plugins: add generator
CurrentState: use freemem32 if available
Python example10.py and param reset
Utilities: remove unneeded nuget
example8 update
CurrentState: add generator status
MainV2: make plugin more thread safe
ntrip: add listerning message
LogBrowse: fix line no exponent
mavgraphs: add distance from ekf origin
temp: add full param file
MagCalib: dont let a lsq error abort
PluginLoader: bg compile cs
plugins: example8 make compile under c#5
LogMap: fix posible bad image load
LogIndex: fix distance calcs
MainV2: ensure we always request autopilot_version
Uploader: remove sync delay
Updater: try harder to remove .old
Graphs: update
Example8: header bar
Mavlink: upstream update
Warning: Fixes
Px4uploader: use less cpu
ntrip: netcore
MagCalib: remove obsolete
ConfigUserDefined: fix selection on reopen
Mavlink: add generator msg
ConfigUAVCAN: blind send switch to uavcan
SerialPort: remove SerialPortFixer
MAVLinkInterface: initilizer cleanup
Firmware: thread
ZeroConf: change retry interval
px4uploader: add trace code
Ntrip: support can_rtcm
MAVLinkInterface: remove use of obsoletes
Cleanup
BindableListView
Class File Seperation
CurrentState: display prearm error
ConfigHWCompass2: add missing compass
MessageBox: debug
Plugin: InitialParamCalc add
MAVlink: fix clear
SkiaGraphics: update
Program: add /updatebeta cmdline
Project Cleanup
libSkiaSharp: arm and arm64
MAVLink: remove unsafe
MainV2: dont print process modules to console
adsb: fix null exception
RemoteLog: fix first packet
RemoteLog: add
ApplicationInsights: add
mavftp: fix enum
MavFTP: hide romfs
HUD: fix bars
MAVLinkInterface: add lastlogreadwall
FlightData: tighten logplayback loop
Plugin: fix compile
WPOverlay: add alt unit display
Example: plugin update
PluginLoader: default to csharp5 then 8
example7: can rtcm extract
ConfigSerialInjectGPS: set default baud
UAVCAN: fix null exception
CodeGen: cleanup refs
MemoryStream: change to getbuffer to prevent copy
Plugins: dont copy refs
CodeGen: add roslyn — csharp8
Program: add arch loging on startup
SITL: update swarm hz lower
Exception fixs from error reports
Joystick: ensure array is always 20
build: update
FlightData: fix adsb null exception
Extension: ChunkByField improve memory usage
appveyor: plugin dir cleanup
CurrentState: GeoFenceDist update
Xamarin: sdk link and arm64
SITL: async wait on connect
MAVLink: update and flags
CurrentState: add EKF_UNINITIALIZED logic
FlightData: add ability to change tooltip content on icon
Example: update
CodeGen: check for compile warnings
plugins: examples
MAVLinkInspector: double buffer treeview
FlightData: change status to custom draw, vs many labels
Program: add mono stack dump
MainV2: init zeroconf
CodeGen: prevent namespace clash
Extensions: add high res to/from unix time
UAVCAN: fix param real type bug
plugins: folder case mono fix
HUD: link quality bar change
wasm: fix compile
PluginLoader: add log at startup
CurrentState: update for EKF_STATUS_FLAGS
QuickView: handle draw exceptions
CurrentState: update highlatency to fix rel alt #2410
ironpython: update exmaple2 add sub
CommsSerialPipe: add read timeout
px4uploader: fix old bootloader support
ConfigFirmwareManifest: prevent usb insert after flash
FlightPlanner: add fallback get home
meee1 released this Aug 28, 2020
MatLabForms: exception around conversion
FaceMapUI: check for invalid grid
MavFTPUI: exception check on progress
UAVCAN: add beta check
appx update
ConfigHWCompass2: rework source values
ConfigHWCompass2: add rebootrequired
CurrentState: remove messageHighTime
SerialPort: filter getNiceName
ConfigHWCompass2: add row counter
LogMetaData: add parser
ConfigArducopter: remove TUNE Scale
CommsNTRIP: fix mono issue
MAVLinkInterface: fix legacy fence display
FlightPlanner: fix plane fence detection bug
Advanced Tuning filed background color fix
ACCEL ME and INPUT TC filed was missing change indication.
Fixed x from outer scope test. Changed to item.
Fixed joystic window not loading saved joystic buttons settings.
UTMMGR: fix utm to mrgs conversion for zone N+
OpenGLtest2: modify samples
ConfigREPL: add exception check
FlightPlanner: add shp file load exceptio check
Camera: check for camera compid and example4
MainV2: make param_bg use bg thread
FlightPlanner: prevent bad fence on mission draw
Program: add full stack trace on error
MAVLinkInspector: add more strings
Propagation: update color table
Download: use single httpclient
FlightPlanner: restore plannedhome is no valid home
ParameterMetaDataParser: support multiple vehicle selector
Set Mode dropdown fix
Let the Set Mode dropdown in FlightData/Actions retain selected value if not clicked in, instead of go back to stabilize every time.
LogBrowse: fix culture issue #2387
FlightPlanner: add PlannedHomeLocation
Plugin: add example3 — geofence shading
GMapMarkerFill: add
PluginLoader: use compile file
CodeGen: add compile from filename — easy debug
CurrentState: reenable GeoFenceDist
ConfigSerialInjectGPS: add QZSS snr
rtcm3: fix snr’s and overrides
FlightPlanner: prevent fatal exception on saveWPs
Xamarin: fix hud font
Xamarin: h265/h264
MP: update beta Version no
AP_REPL: update mav_cmd
FlightData: update point camera here after breaking change #2392
ConfigSerialInjectGPS: attempt slcan config on comport connect
MAVLinkInterface: add frame to doCommandInt
meee1 released this Aug 28, 2020
meee1 released this Dec 5, 2019
Mission Planner 1.3.70 — 04-12-2019
MAVLinkInterface: propagate radio/status across all mavs on the link
inf2cat: update
mavcmd: remove invalid cmd’s #2249
UdpSerialConnect: mcast support
CaptureMJPEG: fix
ConfigFirmwareManifest: updatebootloader fix
LogOutput: dont include if file doesnt exist
ConfigUAVCAN: add port open check
ConfigHWCompass: remove enable #2264
FlightPlanner: fix wpfile format
Exception fixs
CommsInjection: full read/write
GridUI: generic font
httpserver: support 2way websockets
MAVLinkInspector: cleanup on exit
srtm: fix 60N+ data status
FlightPlanner: fix savewp frame type #2262
Скачать Mission Planner для ПК
Опубликовано Polemics Applications LLC
- Категория: Utilities
- Дата выпуска: 2014-10-07
- Текущая версия: 1.2
- Размер файла: 11.73 MB
- Совместимость: Требуется Windows 10/8.1/8/7/Vista
Mission Planner для ПК Скриншоты

загрузить и установить Mission Planner на вашем персональном компьютере и Mac
Некоторые приложения, например, те, которые вы ищете, доступны для Windows! Получите это ниже:
| SN | заявка | Скачать | рецензия | Разработчик |
|---|---|---|---|---|
| 1. |  Mission Planner Mission Planner | Скачать | /5 0 рецензия |
Или следуйте инструкциям ниже для использования на ПК :
Если вы хотите установить и использовать Mission Planner на вашем ПК или Mac, вам нужно будет загрузить и установить эмулятор Desktop App для своего компьютера. Мы усердно работали, чтобы помочь вам понять, как использовать app для вашего компьютера в 4 простых шагах ниже:
Шаг 1: Загрузите эмулятор Android для ПК и Mac
Хорошо. Прежде всего. Если вы хотите использовать приложение на своем компьютере, сначала посетите магазин Mac или Windows AppStore и найдите либо приложение Bluestacks, либо Приложение Nox . Большинство учебных пособий в Интернете рекомендуют приложение Bluestacks, и у меня может возникнуть соблазн рекомендовать его, потому что вы с большей вероятностью сможете легко найти решения в Интернете, если у вас возникнут проблемы с использованием приложения Bluestacks на вашем компьютере. Вы можете загрузить программное обеспечение Bluestacks Pc или Mac here .
Шаг 2: установите эмулятор на ПК или Mac
Теперь, когда вы загрузили эмулятор по вашему выбору, перейдите в папку «Загрузка» на вашем компьютере, чтобы найти приложение эмулятора или Bluestacks.
Как только вы его нашли, щелкните его, чтобы установить приложение или exe на компьютер или компьютер Mac.
Теперь нажмите «Далее», чтобы принять лицензионное соглашение.
Чтобы правильно установить приложение, следуйте инструкциям на экране.
Если вы правильно это сделаете, приложение Emulator будет успешно установлено.
Шаг 3: Mission Planner для ПК — Windows 7/8 / 8.1 / 10
Теперь откройте приложение Emulator, которое вы установили, и найдите его панель поиска. Найдя его, введите Mission Planner в строке поиска и нажмите «Поиск». Нажмите на Mission Plannerзначок приложения. Окно Mission Planner в Play Маркете или магазине приложений, и он отобразит Store в вашем приложении эмулятора. Теперь нажмите кнопку «Установить» и, например, на устройстве iPhone или Android, ваше приложение начнет загрузку. Теперь мы все закончили.
Вы увидите значок под названием «Все приложения».
Нажмите на нее, и она перенесет вас на страницу, содержащую все установленные вами приложения.
Вы должны увидеть . Нажмите на нее и начните использовать приложение.
Шаг 4: Mission Planner для Mac OS
Привет. Пользователь Mac!
Шаги по использованию Mission Planner для Mac точно такие же, как для ОС Windows выше. Все, что вам нужно сделать, это установить Nox Application Emulator или Bluestack на вашем Macintosh. Вы можете получить Это здесь .
Спасибо за чтение этого урока. Хорошего дня!



