Федоренко на связи
Заметки на полях
Проверка COM порта под linux
 В этой заметке я расскажу про то, как можно проверить COM порт в Linux.
В этой заметке я расскажу про то, как можно проверить COM порт в Linux.
Для этого нам понадобятся:
- права на чтение и запись в COM порт
- программа minicom
- кусок толстого многожильного кабеля
Права доступа
проверяем какие у нас в системе есть COM порты, а также наши права на них:
 /dev/ttyS0 это первый COM порт
/dev/ttyS0 это первый COM порт
/dev/ttyS1 соответственно второй COM порт
/dev/ttyUSB0 специальный кабель-переходник из USB в COM (Gembird UAS111)
Как мы видим для работы с COM портом необходимы права root либо пользователь должен входить в группу dialout
Провод для связи
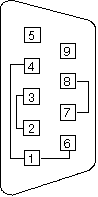 Берём многожильный кабель в оплётке длиной 4-6 см, и соединяем 2 и 3 выводы COM порта перемычкой из этого кусочка провода. Оплётка будет удерживать провод на контактах, а металлические жилы внутри будут проводниками.
Берём многожильный кабель в оплётке длиной 4-6 см, и соединяем 2 и 3 выводы COM порта перемычкой из этого кусочка провода. Оплётка будет удерживать провод на контактах, а металлические жилы внутри будут проводниками.
Для любителей паять можно предложить спаять полный loop-back тестер. В нём соединить не только контакты приёма передачи, но и аппаратный контроль потока и готовность терминала.
Работа с программой minicom
Для начала необходимо настроить программу minicom
Выбираем «Настройка последовательного порта»
Если нужно, меняем СОМ порт, нажимая «A»
Отключаем аппаратное управление потоком, нажимая «F»
Выходим из настроек «Enter»
Сохраняем настройки по умолчанию «Сохранить настройки как dfl»
Выходим из minicom
Собственно проверка СОМ порта
Запускаем minicom без параметров.
Пробуем нажимать на клавиши. В ответ на экране должны появляться символы.
Проверка COM порта под linux завершена.
Эта запись была сделана 21.12.2010, 13:50 под рубрикой Разное. Вы можете подписаться на эту запись с помощью RSS 2.0. Both comments and pings are currently closed.
5 комментариев (and 38 trackbacks)
#1 by Евгений on 02.05.2012 — 12:50
А как им управлять через PHP скрипт? Спасибо за статью!
Источник
Кунг-фу стиля Linux: разбираемся с последовательными портами
Раньше последовательные порты были буквально повсюду. И они, в каком-то смысле, никуда и не делись, так как многое, что подключается к компьютеру по USB, на самом деле, выглядит для системы как последовательный порт. Проблема тут заключается в том, что в наши дни всё в мире завязано на компьютерные сети. Конечно, можно купить терминальный сервер, который преобразует последовательный порт в интерфейс Ethernet. Но это совсем не интересно. Здесь я хочу рассказать о том, как пробрасывать последовательные порты по сети с использованием существующих Linux-инструментов. Решение это не идеальное, оно оказывается работоспособным далеко не всегда, но если оно работает, то работает оно хорошо.

Всё — это файл — до тех пор, пока это не так
Когда-то в прошлом ОС Unix — прародитель Linux — практически всё считала файлом. Все файлы были созданы более или менее равными. Программы не заботило то, с чем именно им приходилось работать: с локальными файлами, с файлами, доступными по сети, с файлами, считанными с ленточного накопителя, или с файлами, прибывшими по именованному каналу.
Но ситуация начала меняться. Несмотря на то, что в Linux последовательный порт — это просто файл, у него имеются некоторые особые атрибуты, которые позволяют, например, задать скорость порта в бодах. И, что ещё хуже, некоторые программы слишком много «знали» о файлах и настоятельно требовали придерживаться определённых соглашений по их именованию. Поэтому, в теории, у пользователя должна была быть возможность создать сетевой сокет и подключить один из его концов к последовательному порту, а другой — к программе. После этого всё должно было нормально работать. Но это — в теории.

Переходник USB/последовательный порт
Практика, конечно, отличается от теории. В некоторых случаях, очень простых, это может и сработать. Для настройки вышеописанной схемы работы с последовательными портами можно воспользоваться утилитой socat (это — нечто вроде cat для сокетов). Но если программа, которую мы пытаемся таким образом обмануть, попробует, например, задать скорость порта в бодах, то у неё, вероятно, ничего не получится. А некоторые программы даже не распознают такой вот ненастоящий последовательный порт.
Подробности о socat
Программа socat напоминает волшебный кабель-переходник, который просто передаёт на выход всё, что поступает на его вход, и, кроме того, поддерживает передачу данных в обратном направлении. Программа может читать данные из файлов, из каналов, с различных устройств, из сокетов и из некоторых других мест. Например, может понадобиться создать простой TCP-прокси для перенаправления соединений с одного локального хоста на другой хост. С помощью socat решить эту задачу очень просто:
То, что получится в результате выполнения этой команды, поддерживает лишь одно соединение. Но socat можно настроить так, чтобы для новых соединений создавались бы форки, что позволяет обрабатывать множество запросов.
Проблема
Правда, если попытаться применить socat для работы с последовательным портом, то получившаяся конструкция вряд ли будет работать без множества дополнительных настроек. Но нужно это так часто, что существует несколько программ, способных нам в этом помочь. В большинстве Linux-дистрибутивов заработает программа ser2net , которая умеет преобразовывать последовательный порт в сокет. Если ser2net кому-то не подойдёт — можно воспользоваться Python-кодом, который имеется среди примеров использования библиотеки pyserial . Правда, та версия pyserial , которая установлена в используемом дистрибутиве, может оказаться слишком старой для поддержки этого кода. Если это так и есть — нужно установить эту библиотеку в обход системного менеджера пакетов, например, воспользовавшись pip .
Далее я исхожу из предположения о том, что для работы с последовательным портом используется ser2net .
Эта утилита обычно устанавливается в виде системной службы, для её настройки можно прибегнуть к редактированию файла /etc/ser2net.conf . Я убрал из этого файла всё, что там было, и добавил туда описания двух нужных мне последовательных портов, указав, кроме прочего, их желаемую скорость в бодах:
После редактирования этого файла сервис надо перезапустить (вероятно, тут подойдёт команда systemctl restart ser2net ; а если она не сработает в первый раз — её стоит попробовать выполнить ещё раз, так как иногда она пытается запустить новую копию сервиса ещё до того, как предыдущая копия полностью завершила работу).
Для целей отладки может понадобиться остановить сервис и запустить его, включив возможность вывода отладочных сообщений:
Но, в любом случае, после того, как сервер заработает, указанные порты (7777 и 7778 в моём конфигурационном файле) будут работать как соответствующие последовательные порты.
Хочу сделать тут несколько замечаний. Если вы пытаетесь проделать это с 3D-принтером, и если у вас запущено нечто вроде Octoprint, то вам понадобится или закрыть программу, или найти другой способ «отвязать» её от принтерного порта до выполнения вышеописанных настроек. Это применимо к любой программе, удерживающей последовательный порт, который нам нужно открыть. В случае с некоторыми стандартными портами нужно удостовериться в том, что механизм входа в систему не удерживает порт открытым, ожидая пользователя. То, как именно это всё заработает, зависит от конкретной системы. То же самое относится и к файрволу. Если прослушивается порт 7777 и при этом используется файрвол, нужно настроить его так, чтобы он разрешал бы подключения к этому порту. При этом надо помнить о том, что для открытия портов с небольшими номерами обычно нужны root-права.
Клиент
На стороне клиента можно использовать socat , но некоторые программы поймут, что перед ними — не настоящий последовательный порт. Правда, никто не мешает попробовать такую команду:
Кое-какие программы, правда, ищут устройства лишь в папке /dev . Если это именно так — понадобится запустить socat с root-правами (воспользовавшись sudo ), а затем нужно будет настроить /dev/ttyNET0 , дав разрешения на чтение и запись (например — sudo chmod 666 /dev/ttyNET0 ).
Тестирование
Если созданный механизм выглядит работоспособным, я, всё равно, не рекомендую сразу же пробовать пользоваться им в программе, для которой он создавался. Советую сначала протестировать его, воспользовавшись чем-то вроде picocom . После запуска socat , например, на клиентской машине должна нормально отработать такая команда:

Утилита picocom может обмениваться данными по сети с использованием виртуального последовательного порта
Если вы попробуете сделать нечто подобное, то вам, понятно, нужно будет указать актуальные для вашей системы имя и скорость порта. У вас, в результате, должна появиться возможность обмениваться данными с удалённым устройством. Если это не получится — нужно разобраться с причинами неполадки до того, как виртуальный порт можно будет использовать в обычной программе. Если в основе вашего последовательного устройства не лежит передача текста, то, возможно, вам больше повезёт с cutecom. Но, к сожалению, эта программа знает о том, что виртуальный последовательный порт — это порт поддельный, и не позволит его выбрать. Правда, программа это опенсорсная, поэтому не слишком сложно будет создать её собственную версию, которая примет любое нужное имя устройства. Конечно, есть и другие варианты. Например — выбрать ненастоящий последовательный порт позволит gtkterm .
Если в ходе тестирования возникнет ошибка протокола, может оказаться так, что последовательный порт перемещён (например — был /dev/ttyUSB0 , а потом стал /dev/ttyUSB1 ), или окажется, что неправильно настроена скорость порта. Сообщения об ошибках не особенно информативны, но при поиске проблем стоит помнить об опции -d программы ser2net .
Документация программы ttynvt устроена просто, но отличается точностью
Когда же дело дойдёт до использования виртуального последовательного порта в обычной программе, всё может заработать как надо. Но может появиться ошибка, или, в некоторых случаях, программа может не позволить выбрать соответствующий файл, так как он не ассоциирован с настоящим последовательным портом. Иногда бывает так, что в чём-то просто не везёт. Правда, тут может пригодиться более интеллектуальный клиент, который знает толк в последовательных портах. Например — ttynvt. Программу, возможно, придётся собрать из исходников, но сделать это очень просто. Она зависит от libfuse , но больше ей ничего особенного не нужно.
После того, как программа будет готова к работе — попробуйте нечто вроде такой команды:
Будет создано устройство /dev/ttyNET0 (отсюда — и потребность в root-правах). В моей системе у нового устройства были права на чтение и запись root-уровня, оно входило в группу dialout . Если вы воспользуетесь этой программой, то вам, возможно, нужно будет проверить и настроить под себя её разрешения.
Перед использованием в обычной программе то, что получилось, опять же, рекомендуется протестировать с помощью picocom . А во время проведения теста стоит скрестить пальцы и надеяться на удачу.
Почему всё так нескладно?
Я, когда связался с последовательными портами, хотел сделать так, чтобы программа Lightburn для лазерного резака работала бы на мощной машине с использованием удалённого рабочего стола. Мне хотелось, чтобы резак был бы подключён к USB-порту на простом локальном компьютере, и чтобы программа взаимодействовала бы с поддельным портом в более серьёзной системе.
Но, к сожалению, сейчас ситуация такова, что Lightburn — программа слишком умная, которая не ведётся на мои хитрости и не хочет показывать мне виртуальные последовательные порты. И нет известного мне способа заставить её использовать имя файла, выбранное мной. Поэтому я даже не могу проверить то, как она работает с виртуальным портом. Правда, мне удалось протестировать подобные порты с некоторыми другими G-Code-программами. И всё это работало хорошо. Я сообщил о моей проблеме разработчикам Lightburn. Возможно, в тот момент, когда вы это читаете, проблема уже решена.
Парадигма «всё — это файл» чрезвычайно мощна. Но, к сожалению, с каждым годом она всё меньше соответствует реальному положению дел. Это создаёт всё больше препятствий тем, кто хочет сделать в Linux что-то интересное и не совсем обычное. Но, как это обычно бывает в Linux, желаемого, всё равно, как-то можно достичь. Я не сомневаюсь в том, что смог бы отследить вызовы, которые выполняет Lightburn для открытия порта, а после этого смог бы найти способ обмануть программу и подсунуть ей последовательный клиент. Но я надеюсь, что делать этого мне не придётся.
Возникала ли у вас необходимость в работе с виртуальными последовательными портами в Linux?
Источник
настройка компорта
Здравствуйте подскажите как в linux через утилиту stty задать такие параметры порта 9600/8N1

stty 9600 cs8 -parenb -cstopb -F /dev/ttyS0
вот так на 8N1 да?
ага, ток запускай от рута
вот кто может пояснить ситуацию с антенны по протоколу nmea на компорт поступают сообщения(посылки) в windows все приходит нормально там программа производителя устройства но когда я вывожу в линуксе с компорта cat ★ ( 19.10.15 22:04:27 )

Запусти любой эмулятор терминала (мне больше самописный нравится) или сессию screen. Ты же понимаешь, что stdout является буферизируемым, поэтому если тебе долго не идут ‘\n’, то ничего ты и не увидишь.
На тебе мои сниппеты для жопоэса.
если в файл вывожу такие же кракозябры бывают) cat /dev/ttyS0>/log
Попробуй мой терминал или хотя бы com из tinyserial.
вся проблема что антенна эта будет использоваться у военных на мсвс5(порезанный редхат) и никакие сурсы в систему ставить нельзя)
поясните подробнее «com из tinyserial» чт овы имели ввиду
никакие сурсы в систему ставить нельзя
Быть такого не может! Либо ставить, либо пусть мучаются. Хотя, им не привыкать.
Под «com из tinyserial» я имел в виду элементарный эмулятор терминала из пакета tinyserial. но даже без него можно выкрутиться: запустить сессию screen! Уж screen-то должен быть даже в огороженном анально МСВС!
minicom должен быть в репозитории (или что там у них, сырцы?)

minicom — монстр, cu из uucp — лучший выбор 🙂
в том то все и дело мне это все не нужно. Мне нужно вывести с ком порта в файл а в файл выводятся то кракозябры то нормальные посылки.
а не использует ли кто в системе этот порт с другой скоростью ?
софт для ups или еще кто. Я тут так разок залетел с agetty повешанной на 57600 на ttyUSB0
Источник



