- Драйверы устройств в Linux
- Часть 2: Пишем в классе наш первый драйвер для Linux
- Динамическая загрузка драйверов
- Наш первый драйвер для Linux
- Сборка нашего первого драйвера
- Подведем итог
- Как написать свой первый Linux device driver
- Подготовительные работы
- Инициализация
- Удаление
- Пишем драйвер сетевого устройства для Linux
- Введение
- Подготовка к разработке драйвера
- Начинаем разработку драйвера
- Обнаружение устройства
- Включение устройства
- Что такое сетевые устройства
- Доступ к устройству не через шину
- Ввод-вывод с отображением в память (Memory-Mapped I/O)
- Доступ к устройству
- Доступ к пространству портов
- Доступ к пространству портов или устройства с отображением ввода-вывода
- Что такое конфигурационноеадресное пространство PCI (PCI Configuration Space)
- Инициализация net_device
- Какой механизм передачи используется в RealTek 8139
- Какой механизм приема используется в RealTek 8139
- Делаем устройство готовым к передаче пакетов
- Делаем устройство готовым к приему пакетов
Драйверы устройств в Linux
Часть 2: Пишем в классе наш первый драйвер для Linux
Оригинал: «Device Drivers, Part 2: Writing Your First Linux Driver in the Classroom»
Автор: Anil Kumar Pugalia
Дата публикации: December 1, 2010
Перевод: Н.Ромоданов
Дата перевода: июнь 2012 г.
В этой статье, которая является частью серии статей о драйверах устройств в Linux, речь идет о концепции динамической загрузки драйверов — сначала мы перед тем, как собирать драйвер, напишем драйвер для Linux, а затем, после сборки, загрузим его.
Светлана и Пагс добрались в свой класс с опозданием и увидели, что их профессор уже начал читать лекцию. Светлана робко попросила разрешения войти. Раздраженный профессор Гопи ответил: «Входите! Вы, друзья, опять сегодня опоздали, и по какой причине»?
Пагс поспешно ответил, что они обсуждали именно ту тему, которую сегодня изучают в классе — драйверы устройств в Linux. Пагс был более, чем счастлив, когда профессор сказал: «Хорошо! Тогда что-нибудь скажите о динамической загрузке в Linux. Если вы справитесь, то я прощу вас обоих!». Пагс знал, что один из способов сделать профессора счастливым, это — покритиковать Windows.
Он объяснил: «Как известно, при обычной установке драйверов в Windows для того, чтобы их активировать, необходимо перезагрузить систему. А если это, предположим, действительно неприемлемо в случае, если это нужно делать на сервере? Вот где выигрывает Linux. В Linux можно загружать и выгружать драйверы на лету, и это активно используется сразу после загрузки системы. Кроме того, драйвер мгновенно отключается после его выгрузки. Это называется динамической загрузкой и выгрузкой драйверов в Linux «.
Это впечатлило профессора. «Хорошо! Идите на свои места, но больше не опаздывайте». Профессор продолжил лекцию: «Теперь, когда вы уже знаете, что такое динамическая загрузка и выгрузка драйверов, я, прежде, чем мы перейдем к написанию нашего первого драйверов, покажу вам, как загружать и выгружать драйвера».
Динамическая загрузка драйверов
Эти динамически загружаемые драйвера чаще всего называют модулями, которые собираются в виде отдельных модулей с расширением .ko (объект ядра). В каждой системе Linux в корне файловой системы (/) есть стандартное место для всех предварительно собранных модулей. Они организованы аналогично древовидной структуре исходных кодов ядра и находятся в директории /lib/modules/ /kernel , где результат вывода системной команды uname -r (см.рис.1).
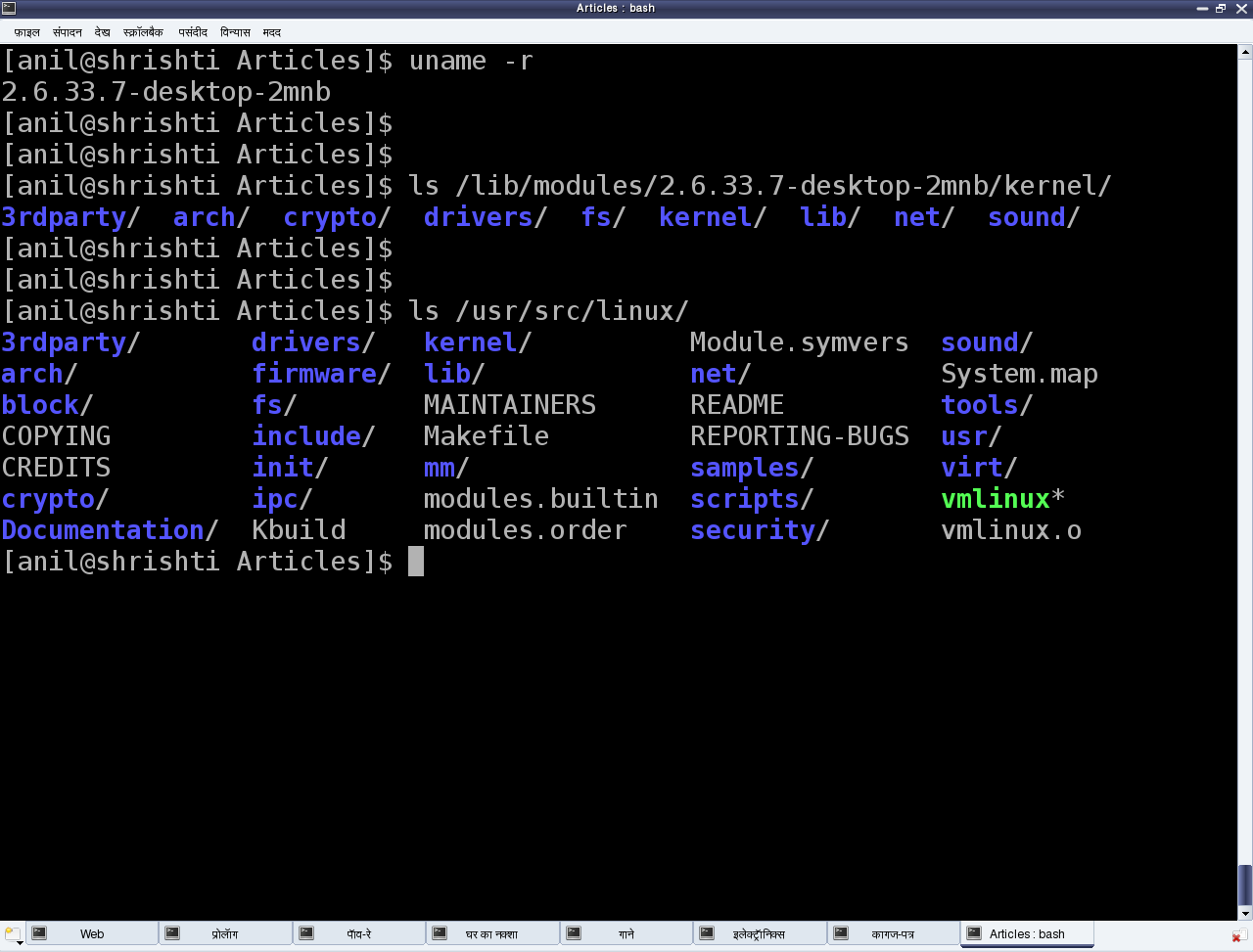
Рис.1: Предварительно собранные модули Linux
Чтобы динамически загружать и выгружать драйверы, воспользуйтесь следующими командами, которые находятся в директории /sbin и должны выполняться с привилегиями пользователя root:
- lsmod — список модулей, загруженных в текущий момент
- insmod — добавление / загрузка указанного файла модуля
- modprobe — добавление / загрузка модуля вместе со всеми его зависимостями
- rmmod — удаление / выгрузка модуля
Давайте в качестве примера рассмотрим соответствующие драйвера файловой системы FAT. На рис.2 показан весь процесс нашего эксперимента. Файлы с модулями будут fat.ko , vfat.ko и т.д., находящиеся в директории fat (в vfat для старых версий ядра) в /lib/modules/`uname -r`/kernel/fs . Если они представлены в сжатом формате .gz , вам нужно будет распаковать их с помощью команды gunzip , прежде чем вы сможете выполнить операцию insmod .
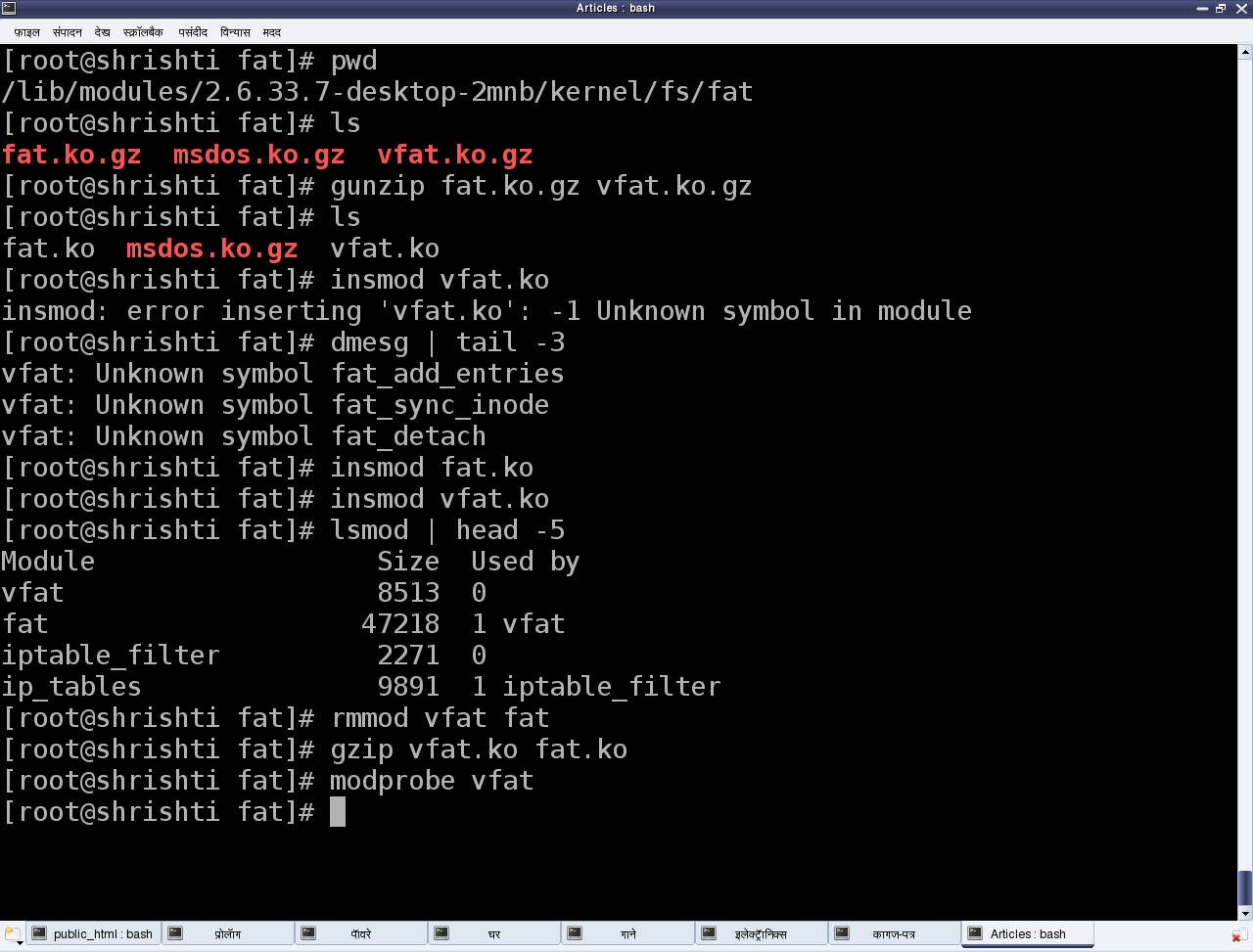
Рис.2: Операции с модулями Linux
Модуль vfat зависит от модуля fat , так что первым должен быть загружен модуль fat.ko . Чтобы автоматически выполнить распаковку и загрузку зависимостей, воспользуйтесь командой modprobe . Обратите внимание, что когда вы пользуетесь командой modprobe , вы не должны в имени модуля указывать расширение .ko . Команда rmmod используется для выгрузки модулей.
Наш первый драйвер для Linux
Перед тем, как написать наш первый драйвер, давайте рассмотрим некоторые понятия. Драйвер никогда не работает сам по себе. Он похож на библиотеку, загружаемую из-за функций, которые будут вызваны из работающего приложения. Он написан на языке C, но в нем отсутствует функция main() . Кроме того, он будет загружаться / компоноваться с ядром, поэтому он должен компилироваться аналогично тому, как было откомпилировано ядро, и вы можете в качестве заголовочных файлов использовать только те, что есть в исходном коде ядра, а не из стандартного директория /usr/include .
Интересный факт, касающийся ядра, это то, что оно, как мы видим даже на примере нашего первого драйвера, представляет собой объектно-ориентированную реализацию на языке C. В любом драйвере есть конструктор и деструктор. Когда модуль успешно загружается в ядро, то вызывается конструктор модуля, а дескруктор модуля вызывается, когда команде rmmod удается успешно выгрузить модуль. Это в драйвере две обычные функции, разве что они называются init и exit, соответственно, и вызываются с помощью макросов module_init() и module_exit() , которые определены в заголовков ядра module.h .
С учетом вышесказанного это полный код нашего первого драйвера; назовем его ofd.c. Обратите внимание, что отсутствует заголовок stdio.h (заголовок пользовательского пространства), вместо него мы используем аналог kernel.h (заголовок пространства ядра). Функция printk() эквивалентна функции printf() . Кроме того, для обеспечения совместимости версии модуля с ядром, в которое будет загружен модуль, добавлен заголовок version.h . С помощью макроса MODULE_* заполняется информация, относящаяся к модулю, которая будет использована как «подпись» модуля.
Сборка нашего первого драйвера
Т.к. у нас есть код на языке C, настало время его скомпилировать и создать файл модуля ofd.ko . Для этого мы используем систему сборки ядра. В приведенном ниже файле Makefile происходит обращение к системе сборки ядра из исходных кодов, а файл Makefile ядра, в свою очередь, обращается к файлу Makefile нашего нового драйвера с тем, чтобы собрать драйвер.
Чтобы собрать драйвер для Linux, у вас в системе должен быть исходный код ядра (или, по крайней мере, заголовки ядра). Предполагается, что исходный код ядра будет находиться в директории /usr/src/linux . Если в вашей системе он находится в каком-нибудь другом месте, то укажите это место в переменной KERNEL_SOURCE в файле Makefile .
Когда есть код на языке C ( ofd.c ) и готов файл Makefile , то все, что нам нужно сделать для сборки нашего первого драйвера ( ofd.ko ), это вызвать команду make .
Подведем итог
Как только у нас будет файл ofd.ko , мы в роли пользователя root или с помощью команды sudo выполним обычные действия.
Команда lsmod должна вам сообщить о том, что драйвер ofd загружен.
Пока студенты экспериментировали со своим первым модулем, прозвенел звонок, сообщивший об окончании урока. Профессор Гопи подвел итог: «В настоящий момент мы не увидели ничего, кроме того, что модуль lsmod сообщил о загрузке драйвера. Куда выводит информацию команда printk ? Найдите это самостоятельно на лабораторных занятиях и познакомьте меня с своими выводами. Также учтите, что наш первый драйвер будет шаблоном для любого драйвера, который можно написать для Linux. Написание специализированных драйверов это всего лишь вопрос о том, чем будет заполнен конструктор и деструктор драйвера. Поэтому дальнейшее изучение будет представлять собой расширение данного драйвера с целью получить драйвер с конкретными функциональными возможностями».
Источник
Как написать свой первый Linux device driver
Здравствуйте, дорогие хабрачитатели.
Цель данной статьи — показать принцип реализации драйверов устройств в системе Linux, на примере простого символьного драйвера.
Для меня же, главной целью является подвести итог и сформировать базовые знания для написания будущих модулей ядра, а также получить опыт изложения технической литературы для публики, т.к. через полгода я буду выступать со своим дипломным проектом (да я студент).
Это моя первая статья, пожалуйста не судите строго!
Получилось слишком много букв, поэтому я принял решение разделить статью на три части:
Часть 1 — Введение, инициализация и очистка модуля ядра.
Часть 2 — Функции open, read, write и trim.
Часть 3 — Пишем Makefile и тестируем устройство.
Перед вступлением, хочу сказать, что здесь будут изложены базовые вещи, более подробная информация будет изложена во второй и последней части данной статьи.
Подготовительные работы
Спасибо Kolyuchkin за уточнения.
Символьный драйвер (Char driver) — это, драйвер, который работает с символьными устройствами.
Символьные устройства — это устройства, к которым можно обращаться как к потоку байтов.
Пример символьного устройства — /dev/ttyS0, /dev/tty1.
К вопросу про проверсию ядра:
Драйвер представляет каждое символьное устройство структурой scull_dev, а также предостовляет интерфейс cdev к ядру.
Устройство будет представлять связный список указателей, каждый из которых указывает на структуру scull_qset.
Для наглядности посмотрите на картинку.

Для регистрации устройства, нужно задать специальные номера, а именно:
MAJOR — старший номер (является уникальным в системе).
MINOR — младший номер (не является уникальным в системе).
В ядре есть механизм, который позволяет регистрировать специализированные номера вручную, но такой подход нежелателен и лучше вежливо попросить ядро динамически выделить их для нас. Пример кода будет ниже.
После того как мы определили номера для нашего устройства, мы должны установить связь между этими номерами и операциями драйвера. Это можно сделать используя структуру file_operations.
В ядре есть специальные макросы module_init/module_exit, которые указывают путь к функциям инициализации/удаления модуля. Без этих определений функции инициализации/удаления никогда не будут вызваны.
Здесь будем хранить базовую информацию об устройстве.
Последним этапом подготовительной работы будет подключение заголовочных файлов.
Краткое описание приведено ниже, но если вы хотите копнуть поглубже, то добро пожаловать на прекрасный сайт: lxr
Инициализация
Теперь давайте посмотрим на функцию инициализации устройства.
Первым делом, вызывая alloc_chrdev_region мы регистрируем диапазон символьных номеров устройств и указываем имя устройства. После вызовом MAJOR(dev) мы получаем старший номер.
Далее проверяется вернувшееся значение, если оно является кодом ошибки, то выходим из функции. Стоит отметить, что при разработке реального драйвера устройства следует всегда проверять возвращаемые значения, а также указатели на любые элементы (NULL?).
Если вернувшееся значение не является кодом ошибки, продолжаем выполнять инициализацию.
Выделяем память, делая вызов функции kmalloc и обязательно проверяем указатель на NULL.
Стоит упомянуть, что вместо вызова двух функций kmalloc и memset, можно использовать один вызов kzalloc, который выделят область памяти и инициализирует ее нулями.
Продолжаем инициализацию. Главная здесь функция — это scull_setup_cdev, о ней мы поговорим чуть ниже. MKDEV служит для хранения старший и младших номеров устройств.
Возвращаем значение или обрабатываем ошибку и удаляем устройство.
Выше были представлены структуры scull_dev и cdev, которые реализуют интерфейс между нашим устройством и ядром. Функция scull_setup_cdev выполняет инициализацию и добавление структуры в систему.
Удаление
Функция scull_cleanup_module вызывается при удалении модуля устройства из ядра.
Обратный процесс инициализации, удаляем структуры устройств, освобождаем память и удаляем выделенные ядром младшие и старшие номера.
С удовольствием выслушаю конструктивную критику и буду ждать feedback’a.
Если вы нашли ошибки или я не правильно изложил материал, пожалуйста, укажите мне на это.
Для более быстрой реакции пишите в ЛС.
Источник
Пишем драйвер сетевого устройства для Linux
Введение
Настоящая статья была написана для тех, кто только начинает изучение ядра Linux и хочет знать о драйверах сетевых устройств. Предполагается, что читатель в должной мере знаком с языком C и средой Linux.
В настоящей статье описывается сетевой драйвер для сетевой платы RealTek 8139. Я выбрал чипсет RealTek по следующим двум причинам: Во-первых, компания RealTek бесплатно предоставляет технические спецификации на этот чипсет (спасибо, RealTek!). Во-вторых, он сравнительно дешев. В Индии его можно приобрести менее, чем за 300 рупий (приблизительно 7 долларов США).
Драйвер, представленный в статье, имеет минимум функций; он просто посылает и принимает пакеты и собирает некоторую статистику. Для ознакомления с полноценным драйвером, написанном на профессиональном уровне, пожалуйста, смотрите исходные тексты Linux.
Подготовка к разработке драйвера
Прежде, чем начать разработку драйвера, нам нужно для этого подготовить систему. Настоящая статья была написана и проверена для ядра Linux 2.4.18, в котором содержится исходный код драйвера чипсета RealTek8139. Может быть в ядре, с которым Вы работаете, драйвер включен в состав ядра, либо скомпилирован как модуль. Для того, чтобы избавиться от каких-либо сюрпризов, желательно собрать ядро, в котором не будет драйвера RealTek8139 ни в каком из вариантов. Если Вы не знаете, как откомпилировать ядро, я рекомендую обратиться по следующей ссылке.
С этого момента обсуждения предполагается, что у вас есть рабочее ядро, в котором нет драйвера RealTek8139. Вам также нужны технические спецификации на чипсет, которые Вы можете загрузить с http://www.realtek.com.tw/ . Последнее, что вам нужно сделать при подготовке, это – правильно вставить сетевую плату в PCI разъем и теперь мы готовы идти дальше.
Настоятельно рекомендуется иметь книгу Rubini Linux Device Drivers в качестве справочника по API. В настоящий момент это лучший известный мне источник сведений для разработки драйверов устройств под Linux.
Начинаем разработку драйвера
Рассмотрим разработку драйвера поэтапно по следующим пунктам:
- Обнаружение устройства
- Включение устройства
- Что такое сетевые устройства
- Доступ к устройству не через шину
- Что такое конфигурационное адресное пространство PCI
- Инициализация net_device
- Какой механизм передачи используется в RealTek8139
- Какой механизм приема используется в RealTek8139
- Делаем устройство готовым к передаче пакетов
- Делаем устройство готовым к приему пакетов
Обнаружение устройства
Каждый разработчик имеет уникальный, назначенный только ему идентификатор ID и назначает уникальный идентификатор ID каждому конкретному виду устройств. Макросы REALTEK_VENDER_ID и REALTEK_DEVICE_ID определяют эти идентификаторы ID. Вы можете найти эти значения в «PCI Configuration Space Table» в спецификациях RealTek8139.
Включение устройства
Давайте на время приостановим процесс изучения кода драйвера; вместо этого мы рассмотрим несколько важных тем, чтобы понять, чем с точки зрения Linux является сетевое устройство. Мы рассмотрим сетевые устройства и разницу между вводом-выводом с отображением в память (memory-mapped I/O), вводом-выводом с отображением по портам (port-mapped I/O) и конфигурационным адресным пространством PCI (PCI configuration space).
Что такое сетевые устройства
Хотя полей в этой структуре значительно больше, для нашего минимального драйвера вполне достаточно перечисленных. Рассмотрим их подробнее:
- name – имя устройства. Если первый символ устройства равен null, то register_netdev назначает ему имя «ethn», где n – подходящий номер, Например, если в вашей системе уже есть eth0 и eth1, то ваше устройство будет поименовано как eth2.
- base_addr – базовый адрес ввода/вывода. Мы обсудим адресацию ввода/вывода далее в настоящей статье.
- addr_len – длина адреса платы (MAC адреса). Для Ethernet-интерфейсов она равна 6.
- dev_addr – адрес платы (Ethernet-адрес или MAC-адрес).
- broadcast – аппаратный адрес широковещательной передачи. Для Ethernet-интерфейсов – это FF:FF:FF:FF:FF:FF.
- hard_header_len — «hardware header length» – количество восьмеричных символов, которые предваряют передаваемый пакет и идут перед заголовком IP или другой информацией протокола. Для Ethernet-интерфейсов длина hard_header_len равна 14.
- irq – номер назначенного прерывания.
- open – указатель на функцию, которая открывает устройство. Эта функция вызывается всякий раз, когда ifconfig активирует устройство (например, «ifconfig eth0 up»). Метод open должен регистрировать все необходимые системные ресурсы (порты ввода/вывода, IRQ, DMA и т.п.), включать устройство и увеличивать на единицу счетчик использования модуля.
- stop – указатель на функцию, которая останавливает интерфейс. Эта функция вызывается всякий раз, когда ifconfig деактивирует устройство (например, «ifconfig eth0 down»). Метод stop освобождает все ресурсы, запрошенные функцией open.
- hard_start_xmit – с помощью этой функции заданный пакет передается в сеть. Первым аргументом функции является указатель на структуру sk_buff. Структура sk_buff используется для хранения пакетов в сетевых стеках Linux. Хотя в этой статье не требуется детальное знание структуры sk_buff’s, подробности можно найти по ссылке http://www.tldp.org/LDP/khg/HyperNews/get/net/net-intro.html .
- get_stats – эта функция предоставляет статистику интерфейса. В выходных данных команды «ifconfig eth0» большая часть полей содержит данные из get_stats.
- priv – приватные данные драйвера. Это личное поле драйвера и он может использовать его по своему усмотрению. Далее мы увидим, как наш драйвер будет использовать это поле для хранения данных, относящихся к PCI устройствам.
Хотя мы не упомянули все поля структуры net_device, пожалуйста, обратите внимание на то, что нет никаких ссылок на функцию, принимающую пакеты. Это делается обработчиком прерываний устройства, что мы также рассмотрим далее в настоящей статье.
Доступ к устройству не через шину
Замечание: Этот раздел был взят из книги Алана Кокса (Alan Cox) «Bus-Independent Device Accesses», которая доступна по ссылке http://tali.admingilde.org/linux-docbook/deviceiobook.pdf
Ввод-вывод с отображением в память (Memory-Mapped I/O)
Наиболее широко используемый способ ввода/вывода – ввод/вывод с отображением в память (memory-mapped I/O). Т.е. часть адресного пространства CPU интерпретируется не как адреса памяти, а используется для доступа к устройству. В некоторых системах с определенной архитектурой требуется, чтобы устройства имели фиксированные адреса, но в большинстве систем имеется некоторый способ обнаружения устройств. Хорошим примером такой схемы является обход шины PCI. В настоящей статье не рассматривается, как получить такой адрес, но предполагается, что изначально он у вас есть.
Физический адрес является беззнаковым числом типа long. Эти адреса не используются напрямую. Вместо этого для того, чтобы получить адрес, который можно было передать в функцию так, как это описано ниже, вам следует вызвать ioremap. В ответ Вы получите адрес, который можно использовать для доступа к устройству.
После того, как Вы закончите использовать устройство (скажем, в вашей подпрограмме выхода из модуля), вызовите iounmap для того, чтобы вернуть ядру адресное пространство. Архитектура большинства систем позволяет выделять новое адресное пространство каждый раз, когда Вы вызываете ioremap, и использовать его до тех пор, пока Вы не вызовете iounmap.
Доступ к устройству
Часть интерфейса, наиболее используемая драйверами, это чтение из регистров устройства, отображаемых в память, и запись в них. Linux предоставляет интерфейс для чтения и записи блоков размером 8, 16, 32 или 64 бита. Исторически сложилось так, что они называются доступом к байту (byte), к слову (word), к длинному числу (long) и к двойному слову или четверке слов (quad). Названия функций следующие — readb, readw, readl, readq, writeb, writew, writel и writeq.
Для некоторых устройств (работающих, например, с буферами кадров) было бы удобнее за один раз передавать блоки, значительно большие чем 8 байтов. Для этих устройств предлагается использовать функции memcpy_toio, memcpy_fromio и memset_io. Не используйте memset или memcpy для работы с адресами ввода/вывода; они не гарантируют копирование данных в правильном порядке.
Работа функций чтения и записи должна происходить в определенном порядке. Т.е. компилятору не разрешается выполнять переупорядочивание последовательностей ввода-вывода. Если компилятору разрешается оптимизировать порядок, то Вы можете использовать функцию __readb и ей подобные с тем, чтобы не требовать строгого сохранения порядка выполнения операций. Пользуйтесь этим с осторожностью. Операция rmb блокирует чтение памяти. Операция wmb блокирует запись в память.
Хотя, по определению, основные функции синхронны относительно друг друга, устройства, которые установлены в шинах, сами по себе асинхронны. В частности многим авторам драйверов неудобно, что запись в PCI шину осуществляется асинхронно. Они должны выполнить операцию чтения из устройства с тем, чтобы удостовериться, что запись была сделана так, как хотел автор. Эта особенность скрыта от авторов драйверов в API.
Доступ к пространству портов
Еще один широко применяемый вариант ввода-вывода, это — пространство портов. Это диапазон адресов, отличающихся от адресного пространства обычной памяти. Доступ к этим адресам обычно не столь быстр, поскольку эти адреса отображаются в адреса памяти, к тому же пространство портов потенциально меньше адресного пространства.
В отличие от ввода-вывода с отображением в память, для доступа к пространству портов подготовка не требуется.
Доступ к пространству портов или устройства с отображением ввода-вывода
Доступ к этому пространству обеспечивается с помощью набора функций, в которых допускается доступ к 8, 16 и 32 битам, известных как байт (byte), слово (word ) и длинное слово (long). Это следующие функции — inb, inw, inl, outb, outw и outl.
Эти функции имеют несколько вариантов. Для некоторых устройств требуется, чтобы доступ к их портам происходил со сниженной скоростью. Эта функциональность обеспечивается при помощи добавления _p в конце команды. Имеются также эквиваленты команды memcpy. Функции ins и out копируют байты, слова и длинные слова в заданный порт и из него.
Что такое конфигурационноеадресное пространство PCI (PCI Configuration Space)
В этом разделе мы рассмотрим конфигурационное адресное пространство PCI. Устройства PCI имеют 256 байтное адресное пространство. Первые 64 байта используются стандартным образом, тогда как использование оставшихся байтов зависит от устройства. На рис.1. показано стандартное конфигурационное адресное пространство PCI
(Прим. пер.: В оригинале статьи Рис. 1 пропущен. Краткое описание конфигурационного адресного пространства PCI на русском языке можно найти в Википедии http://ru.wikipedia.org/wiki/PCI_configuration_space . Недостающий рисунок был взят по ссылке http://en.wikipedia.org/wiki/File:Pci-config-space.svg .)
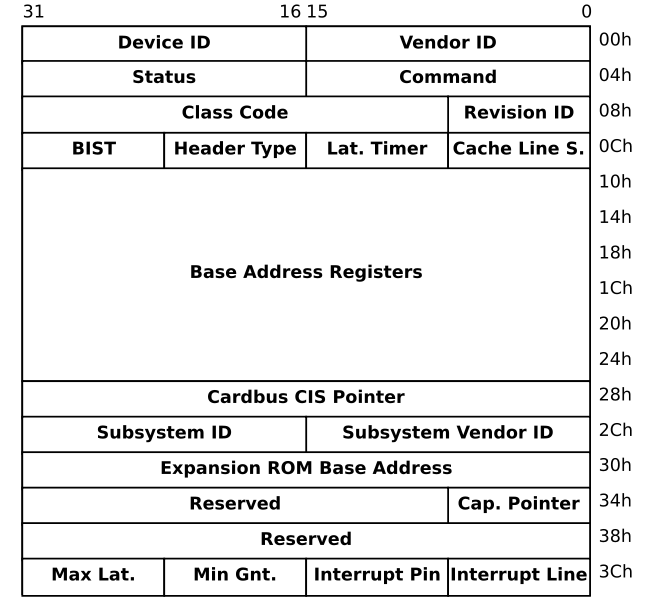
Рис.1: Конфигурационное адресное пространство
Поля «Vendor ID» и «Device ID» содержат уникальные идентификаторы, присвоенные разработчику устройств и устройству соответственно. Мы уже обсуждали их в разделе «Обнаружение устройства». Отметим еще поле — «Base Address Registers» (базовые адресные регистры), известное еще как BAR. Мы кратко расскажем, как использовать регистры BAR.
Инициализация net_device
Таблица 4: Структура rtl8139_private
Таблица 5: Инициализация net_device
Теперь давайте объясним, что мы сделали в таблице 5. Функцию probe_for_realtek8139 мы уже рассматривали. Функция rtl8139_init распределяет память для локального указателя rtl8139_dev, который мы должны использовать как net_device. Вдобавок эта функция заполняет компоненту pci_dev of rtl8139_private для обнаруженного устройства.
Наша следующая цель – получить поле base_addr для net_device. Это начало памяти регистров устройства. Мы напишем драйвер только для ввода-вывода с отображением в память. Чтобы получить базовый адрес для ввода-вывода с отображением в память, мы используем PCI API такие как pci_resource_start, pci_resource_end, pci_resource_len, pci_resource_flags и т.п. Эти API позволяют нам читать конфигурационное пространство PCI, не зная о деталях его реализации. Второй аргумент в этих API – номер BAR. Если Вы видели спецификации RealTek8139, то знаете, что первый BAR (нумеруемый как 0) — I/OAR, тогда как второй BAR (нумеруемый как 1) — MEMAR. Поскольку в этом драйвере используется ввод-вывод с отбражением в память, то в качестве второго аргумента мы передаем 1. Прежде, чем получить доступ к адресам, возвращаемыми указанными выше API, мы должны сделать две вещи. Во-первых, зарезервировать в драйвере указанные выше ресурсы (пространство памяти); это делается с помощью вызова функции pci_request_regions. Во-вторых, отобразить адреса ввода-вывода, описанные в этом разделе ранее, так, чтобы они использовались при вводе-выводе с отображением в память. Адрес io_addr назначается компоненте base_addr в структуре net_device, и это то место, откуда мы можем начинать читать регистры устройства или писать в них.
В оставшейся части кода, приведенного в таблице 5, выполняется обычная инициализация структуры net_device. Заметьте, что теперь мы читаем аппаратный адрес из устройства и записываем его в dev_addr. Если Вы смотрели раздел «Описания регистров» в спецификации RealTek8139, то знаете, что первые 6 байтов являются аппаратным адресом устройства. Также мы должны иметь проинициализированные компоненты указателя на функцию, но не должны определять какую-либо соответствующую функцию. Теперь для компиляции модуля мы добавим фиктивные функции.
Таблица 6: Фиктивные функции
Обратите внимание, что в init_module пропущена часть, обрабатывающая ошибки. Вы можете написать эту обработку, заглянув для этого в модуль cleanup_module, приведенный ниже:
Таблица 7: Функция cleanup_module
Теперь мы имеем готовый фиктивный драйвер или драйвер-шаблон. Откомпилируйте модуль и вставьте его в ядро так, как показано в таблице 8 (предполагается, что исходный код ядра — /usr/src/linux-2.4.18 ).
Таблица 8: Компиляция драйвера
Теперь выполним последовательность команд «ifconfig», «ifconfig — a», «ifconfig rtl8139 up», «ifconfig» и «ifconfig rtl8139 down» и посмотрим на результат. Эти команды покажут, когда каждая функция вызывается. Если все в порядке, то когда вы выполняете команду «ifconfig — a», вы должны обнаружить устройство rtl8139 и должны получить сообщение «function rtl8139_get_stat called «. Когда выполняете команду «ifconfig rtl8139 up», Вы должны получить сообщение «function rtl8139_open called». Аналогичным образом, когда Вы выполняете команду «ifconfig rtl8139 down», Вы должны получить сообщение «function rtl8139_stop called».
Снова остановим разработку драйвера и попытаемся лучше понять, какой механизм передачи и приема данных используется в устройстве.
Какой механизм передачи используется в RealTek 8139
В этом разделе описывается механизм передачи данных в устройстве RealTek8139; однако рекомендуется загрузить руководство по программированию «RTL8139 (A/B) Programming Guide», в котором приведены все подробности. В RealTek8139 имеется 4 дескриптора передачи, каждый дескриптор имеет фиксированное смещение адреса ввода-вывода. Четыре дескриптора используются циклически. Это означает, что для передачи четырех пакетов драйвер будет использовать в циклическом порядке дескриптор 0, дескриптор 1, дескриптор 2 и дескриптор 3. Для передачи следующего пакета драйвер снова будет использовать дескриптор 0 (при условии, что он свободен). В спецификациях RealTek8139 в разделе «Описание регистров» указывается, что регистры TSAD0, TSAD1, TSAD2 и TSAD3 имеют смещения 0x20, 0x24, 0x28, 0x2C, соответственно. В этих регистрах хранится «начальный адрес дескрипторов передачи «, т.е. в них хранится стартовый адрес (в памяти) пакетов, которые должны быть переданы. Позже устройство считает содержимое пакетов из этих адресов DMA, перепишет их в свой собственный стек FIFO, а затем выполнит передачу данных в сеть.
Мы скоро увидим, что этот драйвер выделяет память прямого доступа (доступ DMA), где будут храниться пакеты, и записывает адрес этой памяти в регистры TSAD.
Какой механизм приема используется в RealTek 8139
Приемная часть RTL8139 спроектирована как кольцевой буфер (линейная память, управление которой осуществляется как кольцевой памятью). Всякий раз, когда устройство принимает пакет, содержимое пакета запоминается в память кольцевого буфера и изменяется место, куда будет записываться содержимое следующего пакета (начальный адрес первого пакета + длина первого пакета). Устройство продолжает так запоминать пакеты до тех пор, пока не исчерпается линейная память. В этом случае устройство снова начинает запись с начального адреса линейной памяти, реализуя, таким образом, кольцевой буфер.
Делаем устройство готовым к передаче пакетов
Таблица 10: Определения регистров RTL 8139
Таблица 11: Пишем функцию открытия устройства
Таблица 12: Пишем функцию start_xmit
Функция rtl8139_start_xmit, показанная в таблице 12, исключительно тривиальная. Сначала она ищет имеющийся дескриптор передачи, а затем проверяет, чтобы размер пакета был, по меньшей мере, 60 байтов (поскольку размер пакетов Ethernet не может быть меньше 60 байтов). Как только это будет сделано, будет вызвана функция skb_copy_and_csum_dev, которая скопирует содержимое пакетов в имеющуюся память DMA. Следующей функцией writel мы информируем устройство о длине пакета. После этого пакеты передаются в сеть. Затем мы определяем имеющиеся в наличии следующие дескрипторы передачи и, если так случится, что он будет равен дескриптору, для которого передача еще не завершена, то мы остановим устройство; в противном случае мы просто выйдем из функции.
Теперь наше устройство готово отсылать пакеты (помните, что мы еще не можем принимать пакеты). Откомпилируйте драйвер и попытайтесь послать пакеты ping. На другом конце Вы должны увидеть несколько пакетов ARP. Даже если удаленные хосты будут отвечать на пакеты ARP, они для нас будут бесполезными, поскольку мы не готовы их принимать.
Делаем устройство готовым к приему пакетов
Таблица 13: Расширяем структуру rtl8139_private
Компонента stats должна хранить статистику с устройства (большая часть статистики, выдаваемой ifconfig, берется из этой структуры). Следующая компонента, rx_ring, является адресом памяти в ядре, где запоминаются принятые пакеты, а rx_ring_dma – физический адрес этой памяти. Как мы скоро увидим, компонент cur_rx используется для отслеживания места, куда будет записываться следующий пакет.
Таблица 14: Расширяем функцию rtl8139_open
Код в таблице 14 вычисляет размер памяти, нужный для кольцевого буфера. Вычисление RX_BUF_TOT_LEN зависит от некоторых конфигурационных параметров устройства. Как мы скоро увидим, в функции rtl8139_hw_start устанавливаются значения битов 12 – 11 регистра RCR в 10, что задает длину приемного буфера равной 32K+16. Таким образом, мы выделяем этот объем памяти для приемного буфера. Также мы устанавливаем значение бита с 7 в 1, что означает, что RTL8139 переместит остальные пакетные данные в память, которая идет сразу после конца приемного буфера. Поэтому мы дополнительно выделяем 2048 байтов с тем, чтобы справиться с такими ситуациями.
Таблица 15: Расширяем функцию rtl8139_hw_start
Как видно в таблице 15, первое изменение в функции rtl8139_hw_start — мы записываем в регистр CR значения CmdTxEnb | CmdRxEnb, что означает, что устройство будет передавать и принимать пакеты. Следующее изменение – конфигурирование приемной части устройства. Я не использовал в коде макросы, но, если вы смотрели спецификации rtl8139, они понятны. В этом месте используются следующие биты:
- Бит 1 – Принимаются пакеты с проверкой физического адреса (адреса MAC – прим.пер.).
- Бит 2 – Принимаются многоадресные пакеты (посылаемые на несколько адресов – прим.пер.)
- Бит 3 – Принимаются широковещательные пакеты (посылаемые на все адреса – прим.пер.)
- Бит 7 — WRAP. Когда установлен в 1, то RTL8139 будет перемещать оставшуюся часть пакетных данных в память, которая следует непосредственно за концом премного буфера.
- Биты 8-10 — Максимальный размер буфера DMA для каждого сохраняемого в DMA пакета. Мы устанавливаем это значение равным 111, что означает – неограниченный.
- Биты 11-12 – Длина буфера приема. Мы устанавливаем это значение равным 10, что означает 32K+16 байтов.
Следующее крупное изменение – конфигурирование регистра RBSTART. В этом регистре содержится стартовый адрес приемного буфера. Далее мы обнуляем регистр MPC (Missed Packet Counter – счетчик ошибочных пакетов) и конфигурируем устройство так, чтобы не генерировались ранние прерывания.
Последняя большая функция, которую мы хотим обсудить – обработчик прерываний устройства. Этот обработчик прерываний ответственен за прием пакетов, а также за обновление необходимой статистики. Ниже приведен исходный код обработчика прерываний.
Таблица 16: Обработчик прерываний
Последняя функция, которую мы хотим добавить — rtl8139_get_stats, она просто возвращает tp->stats.
Таблица 17: Функция rtl8139_get_stats
Этим завершается разработка нашего драйвера. Откомпилируйте его, снова вставьте его в ядро (Вы должны с помощью команды rmmod выгрузить предыдущий модуль) и пропингуйте другой хост. Вы должны получить ответ на пинги.
Хотя драйвер профессионального уровня содержит гораздо больше возможностей, чем имеется в нашем драйвере, последний даст вам хорошее представление о сетевых драйверах и поможет понять процесс разработки драйверов.
Источник



