- Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 1
- Введение
- Аппаратная платформа
- Комплект инструментов
- Установка OpenOCD
- Подключение адаптера SAM-ICE
- Совместная работа адаптера SAM-ICE и сервера отладки OpenOCD
- Создание комплекта в Qt Creator
- ПЛК нового поколения WirenBoard на базе Linux
Программирование и отладка микроконтроллеров ARM Cortex-M4 фирмы Atmel в среде операционной системы Linux. Часть 1
Представляем электронную версию статьи из номера №2 за 2016 год журнала Компоненты и технологии. Автор Курниц Андрей.
В статье описан процесс развертывания экосистемы разработки приложений для микроконтроллеров Atmel серии SAM4S в среде операционной системы Linux. Читатель познакомится также с оценочной платой SAM4S-EK и семейством ARM Cortex-M4 микроконтроллеров фирмы Atmel. Приведены рекомендации по работе с адаптером отладки SAM-ICE (он же J-LINK) и программой OpenOCD.
Введение
Выбор операционной системы Linux в качестве среды для программирования микроконтроллеров ARM Cortex-M4 фирмы Atmel сложно назвать общепринятой практикой. Напротив, для разработки под свои микроконтроллеры Atmel свободно распространяет среду Atmel Studio 7, предназначенную исключительно для операционных систем Windows. Не будет секретом и тот факт, что разворачивание и настройка среды Atmel Studio 7 для новичка окажется куда проще, чем выбранный автором путь.
Автор предлагает использовать среду разработки Qt Creator в связке с инструментарием для кросс-компиляции GCC и с пакетом OpenOCD для отладки. В качестве операционной системы автор выбрал Linux Lubuntu 14.04 LTS (выполняющуюся на виртуальной машине, но это не существенно). Такой подход позволяет с легкостью переходить на другие ARM (и не только) микроконтроллеры, не меняя при этом привычный комплект инструментов. Например, в [1] приводится пример разработки для микроконтроллеров STM32F4 фирмы ST microelectronics с применением такого же комплекта инструментов.
Несколько слов об используемой терминологии. Аппаратное устройство, которое подключается к целевому микроконтроллеру и к рабочей станции, далее называется отладочным адаптером. Отладчиком же будет называться компьютерная программа, служащая для пошагового выполнения программы, просмотра значений ячеек памяти и т.д.
Аппаратная платформа
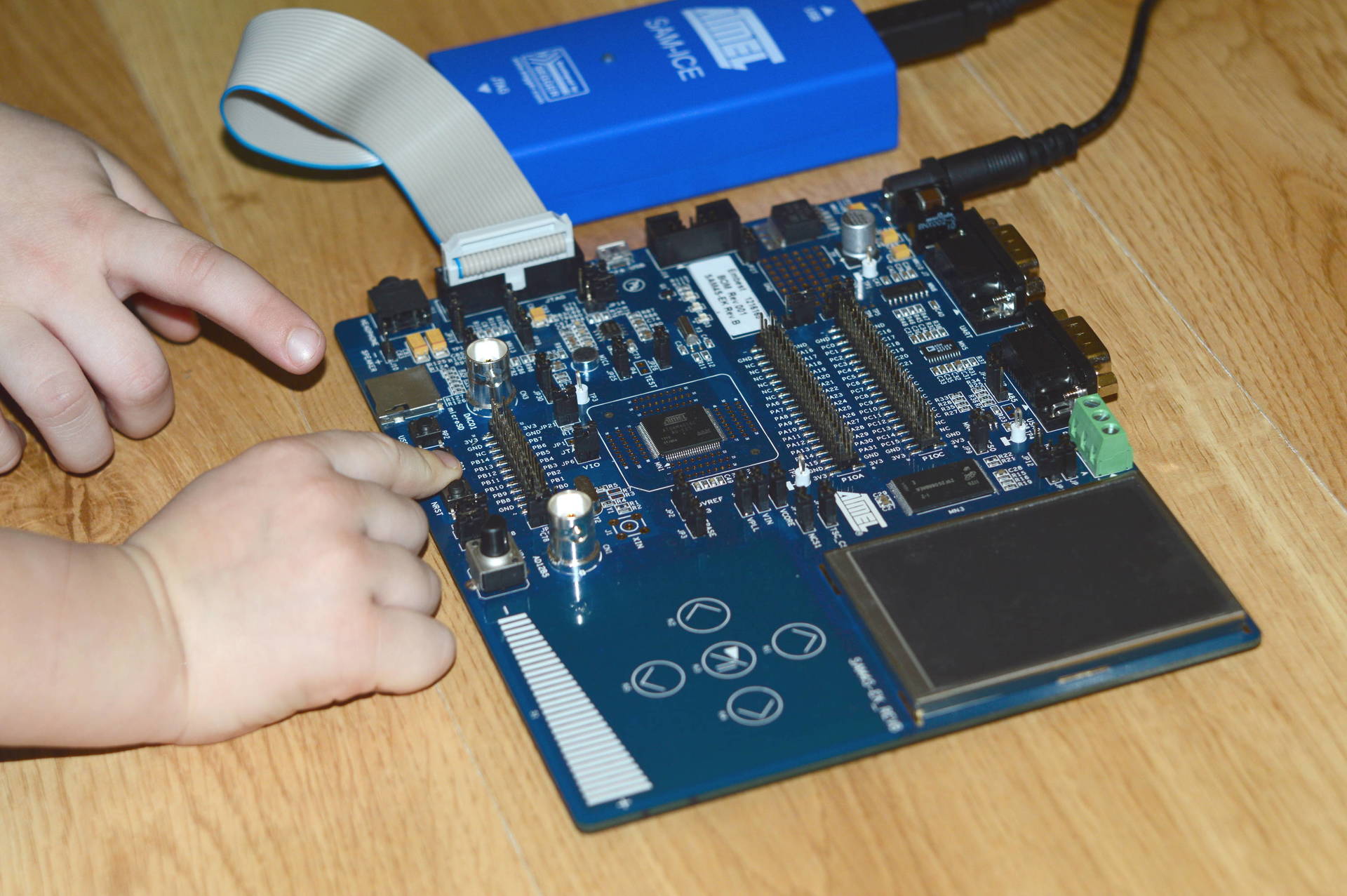
Рис. 1. Внешний вид платы SAM4S-EK с подключенным отладочным адаптером.
В основе оценочной платы лежит микроконтроллер SAM4S16C фирмы Atmel, ключевые особенности которого приведены ниже:
- Ядро ARM Cortex-M4, максимальная тактовая частота 120МГц
- Объемы памяти на кристалле: 1 Мбайт flash-памяти и 128 кбайт ОЗУ
- Среди периферийных устройств можно выделить: USB контроллер (работа только в режиме Device), контроллер внешней NAND flash-памяти, контроллер SD карт памяти
- Контроллеры интерфейсов UART, I2C, SPI и др.
- 100-выводный корпус
Среди особенностей оценочной платы SAM4S-EK можно выделить следующие:
- Микросхема NAND flash-памяти Micron MT29F2G08ABAEA объемом 2 Гбит
- Цветной дисплейный модуль FTM280C34D разрешением 320×240 точек, с диагональю 2,8 дюйма и с резистивной сенсорной панелью. Дисплей содержит встроенный контроллер Ilitek ILI9320, подключенный к микроконтроллеру по параллельному интерфейсу.
- Контроллер резистивной сенсорной панели Texas Instruments ADS7843E
- Распаяны два DB9 разъема для двух портов RS-232 (один из них — с сигналами RTS, CTS), выведен также интерфейс RS-485
- Элементы сенсорного управления по технологии Atmel QTouch, расположены прямо на печатной плате (сенсорные кнопки 5 шт. и слайдер)
- Электретный микрофон и операционный усилитель TS922 для него
- Усилитель звуковой частоты для подключения наушников TPA022, а также 3,5мм гнездо типа «джек».
- Два коаксиальных BNC разъема, которые подключены к встроенным АЦП и ЦАП блокам микроконтроллера.
- Держатель micro-SD карты памяти
- 63 вывода общего назначения (GPIO) выведены на IDC разъемы с шагом 2,54 мм
Более подробно как о плате SAM4S-EK, так и о микроконтроллере SAM4S16C можно ознакомиться на сайте Atmel [12].
Комплект инструментов
Когда аппаратная (плата SAM4S-EK) и программная (операционная система Linux Lubuntu) платформы определены, можно построить систему аппаратных и программных инструментов для программирования и отладки целевого микроконтроллера (рис. 2) 
Рис. 2. Структурная схема процесса отладки микроконтроллера
Микроконтроллер по интерфейсу JTAG подключен к отладочному адаптеру SAM-ICE, который в свою очередь подключен к рабочей станции по интерфейсу USB. Питание отладочного адаптера подается также по интерфейсу USB, а питание платы разработчика вместе с микроконтроллером должно осуществляться отдельно (на рис. 2 не показано).
На рабочей станции должна выполняться некая программа, которая будет взаимодействовать с адаптером отладки SAM-ICE с одной стороны и отладчиком GDB, входящим в инструментарий GCC, с другой. На эту роль идеально подходит свободно распространяемая программа OpenOCD 4, которая помимо отладки может использоваться для загрузки прошивки во flash-память микроконтроллера и для внутрисхемного тестирования.
Программа OpenOCD поддерживает как адаптер отладки SAM-ICE (в действительности это аналог популярного J-LINK), так и оценочную плату SAM4S-EK (соответственно и микроконтроллеры Atmel SAM4). Кроме этого OpenOCD доступна в виде исходных кодов и может быть собрана для операционной системы Linux.
Интегрированная среда разработки Qt Creator (рис. 2) получает отладочную информацию через отладчик GDB и предоставляет в удобном для разработчика виде (точки останова, значения переменных, пошаговое выполнение программы и др.)
Программа OpenOCD работает в режиме сервера и допускает подключение других клиентов-программ, например, telnet-клиента (рис. 2). Это может быть удобно для серийного программирования микроконтроллеров на производстве.
Установка OpenOCD
Установить OpenOCD можно наименее трудоемким способом — из репозиториев Ubuntu, для чего следует выполнить команду:
Однако в этом случае будет установлена устаревшая версия 0.7.0 (проверить версию установленной программы OpenOCD можно выполнив команду openocd —version).
Для получения актуальной версии (на момент написания статьи — 0.9.0), необходимо собрать OpenOCD из исходных кодов. Для этого надо выполнить следующие действия:
1. Загрузить исходные коды OpenOCD с сайта [2], выполнив команду:
В результате в домашнем каталоге должен появиться файл-архив openocd-0.9.0.tar.bz2.
2. Далее следует разархивировать OpenOCD, выполнив команду:
В результате, в домашнем каталоге должен появиться каталог с исходным кодом openocd-0.9.0
3. Проверить, установлена ли библиотека libusb-dev, которая необходима для взаимодействия рабочей станции и адаптера SAM-ICE по USB интерфейсу. Чтобы проверить наличие библиотеки libusb-dev, следует выполнить команду:
Если библиотека установлена, то вывод должен быть примерно такой:
Если библиотека не установлена, то ее установить ее можно, выполнив команду:
4. Для сборки OpenOCD также потребуются следующие пакеты:
- make,
- libtool,
- pkg-config версии 0.23 и выше,
- autoconf версии 2.64 и выше,
- automake версии 1.9 и выше,
- texinfo
Проверить их наличие можно тем же способом, что и библиотеки libusb-dev, как описано выше.
5. Теперь можно собрать пакет OpenOCD с поддержкой адаптера SAM-ICE, для чего следует последовательно выполнить следующие команды:
Ключ —enable-jlink предписывает включить поддержку адаптера J-LINK. Дело в том, что адаптер SAM-ICE представляет собой модифицированный J-LINK BASE от фирмы Segger так, что он может работать только с микроконтроллерами фирмы Atmel. Однако программный интерфейс для работы с J-LINK полностью совместим с адаптером SAM-ICE.
Подключение адаптера SAM-ICE
Далее следует подключить адаптер SAM-ICE к рабочей станции и проверить список подключенных по USB устройств командой:
lsusb
Если адаптер SAM-ICE подключен, то вывод команды должен содержать следующую строку:
Где 1366 — VID-номер (код производителя USB-устройства), 0101 — PID-номер (код изделия). Эти номера потребуются в дальнейшем для настройки менеджера устройств udev.
Чтобы обеспечить взаимодействие сервера отладки OpenOCD с адаптером SAM-ICE по интерфейсу USB необходимо создать файл-правило для менеджера устройств udev, например, так:
В окне редактора Nano ввести следующий текст:
Где поля idVendor и idProduct соответствуют полученным ранее номерам VID и PID.
Далее следует перезагрузить рабочую станцию.
Если же сконфигурировать udev, как описано в [3], то запуск сервера отладки OpenOCD будет возможен только с правами суперпользователя, что в дальнейшем создаст проблемы с отладкой из среды QtCreator.
Совместная работа адаптера SAM-ICE и сервера отладки OpenOCD
/sam/) создать файл конфигурации openocd.cfg со следующим содержимым:
Файл openocd.cfg содержит предписания для сервера OpenOCD, а именно:
- разрешить подключение к серверу по протоколу telnet через порт 4444,
- установить порт 3333 для подключения отладчика GDB,
- соединяться с адаптером J-LINK (SAM-ICE),
- целевая платформа — оценочная плата Atmel SAM4S_EK,
- разрешить программирование flash-памяти.
Теперь, когда необходимое программное обеспечение установлено, а отладчик подключен к рабочей станции и целевому микроконтроллеру, можно проверить работоспособность системы. Для этого следует, находясь в каталоге проекта (
/sam/), запустить сервер OpenOCD командой
Если все сделано правильно, в терминал будет выведено:
При этом приглашение командной строки выведено не будет, что свидетельствует о том, что сервер успешно запущен и установлено соединение с целевым микроконтроллером через отладочный адаптер SAM-ICE.
Теперь можно подключиться к серверу отладки по протоколу telnet, для чего надо открыть второй терминал и выполнить команду:
Где 4444 – номер порта, заданный ранее в конфигурационном файле openocd.cfg. В результате будет установлено соединение с сервером отладки и появится приглашение для ввода команд:
Когда соединение с сервером установлено, можно выполнить любую из команд OpenOCD (полный список — в [7]), например, просмотреть содержимое регистров ядра микроконтроллера. Для этого следует остановить выполнение программы в микроконтроллере командой halt:
Затем просмотреть непосредственно содержимое регистров командой reg:
Завершить работу сервера OpenOCD можно командой shutdown, при этом автоматически закроется и telnet соединение:
Связку «адаптер SAM-ICE – программа OpenOCD» можно использовать для серийного производства для загрузки готовой прошивки во flash-память микроконтроллера. Например, чтобы очистить всю flash-память микроконтроллера Atmel SAM4S16C, необходимо выполнить команду:
Где 0x00400000 — адрес начала flash-памяти в адресном пространстве, 0x100000 — размер flash-памяти в шестнадцатеричной системе счисления, для микроконтроллера SAM4S16C составляет 1 Мбайт = 2^20 байт = 0x100000(16) байт. Адрес начала flash-памяти и ее размер получен из документации на данный микроконтроллер [12].
В случае успешного стирания вывод программы OpenOCD должен содержать строку:
Для непосредственно записи прошивки во flash-память надо выполнить команду:
Где sam.hex — имя файла с прошивкой в формате Intel HEX. OpenOCD принимает также другие форматы файлов с прошивкой, например binary и ELF.
В случае успешной загрузки прошивки во flash-память вывод должен содержать строки:
То есть в данном случае очищается лишь те сектора flash-памяти, в которые будет размещена прошивка.
Создание комплекта в Qt Creator
Теперь, когда связка «адаптер отладки — сервер отладки» настроена и готова к работе, можно приступать к настройке интегрированной среды разработки, в нашем случае — Qt Creator.
При этом предполагается, что на рабочую станцию уже установлен инструментарий GCC для сборки для микроконтроллеров ARM, а также установлена и настроена сама среда Qt Creator, процесс установки и настройки которых подробно описан в [1].
Прежде всего, необходимо добавить сервер отладки, для этого в Qt Creator следует вызвать настройки (пункт главного меню «Инструменты –> Параметры…»), выбрать вкладку «BareMetal» («Голое устройство»), нажать «Добавить» и выбрать пункт «OpenOCD». Появится окно, где можно указать параметры запуска сервера (рис. 3). Следует отметить, что поддержка OpenOCD добавляется в среду Qt Creator при включении модуля «BareMetal», как это сделать — описано в [1]. 
Рис. 3. Добавление сервера отладки OpenOCD в Qt Creator.
Имя сервера отладки можно задать «OpenOCD + SAM-ICE» (рис. 3), «Режим запуска» следует установить в «Запуск в режиме TCP/IP», так как сервер OpenOCD будет выполняться на рабочей станции, то поле «Хост» должно содержать имя компьютера «localhost» и порт 3333, указанный ранее в конфигурационном файле openocd.cfg.
В поле «Исполняемый файл» следует вписать имя исполняемого файла openocd (или полный путь к нему, если необходимо). Поле «Файл конфигурации» должно содержать путь к файлу конфигурации OpenOCD, созданному ранее, в данном случае это
sam/openocd.cfg. Поля «Команды инициализации» и «Команды сброса» по умолчанию содержат команды управления сервером, менять их содержимое не требуется.
Далее можно добавить новое устройство, для которого будет производиться сборка и отладка — микроконтроллер семейства Atmel SAM4S. Для этого в настройках Qt Creator следует выбрать вкладку «Устройства» и нажать «Добавить…».
После чего ввести имя устройства, например «Atmel SAM» и выбрать настроенный ранее сервер отладки «OpenOCD + SAM-ICE».
Когда устройство добавлено, можно окончательно настроить комплект для сборки так, как показано на рис. 4.
Рис. 4. Добавление комплекта для микроконтроллеров Atmel SAM4S в Qt Creator.
Компилятор GCC и отладчик GDB заданы из состава инструментария GCC для микроконтроллеров ARM так, как описано в [1].
Продолжение статьи будет оформлено в виде отдельной публикации, чтобы не раздувать объем.
Источник
ПЛК нового поколения WirenBoard на базе Linux
Контроллер автоматизации WirenBoard от наших партнеров ООО «Бесконтактные устройства»— очень гибкое решение для автоматизации, предназначенное для широкого круга задач. Контроллер представляет собой одноплатный компьютер с большим количеством как проводных так и беспроводных интерфейсов, заменяя собой множество устройств! Работает ПЛК под управлением широкого распространенной операционной системой Linux семейства Debian, что открывает перед инженерами большие возможности.

Контроллер нового поколения для автоматизации WirenBoard
Среди проводных интерфейсов следует отметить широко распространенный интерфейс 1-wire, RS-485 с поддержкой modbus «из коробки», релейные выходы и многое другое.
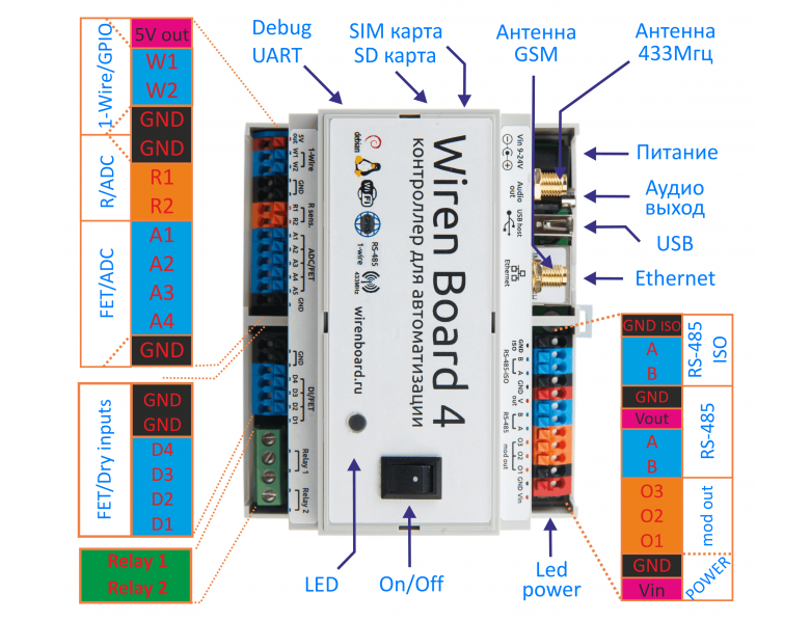
Порты контроллера WirenBoard
На базе WirenBoard можно легко строить беспроводные системы мониторинга температуры и влажности, т.к. прибор поддерживает работу с датчикам OREGON Scientific. После доработки датчиков OREGON Scientific нашими инженерами, дальность связи может быть увеличена до 100м. (Стандартная дальность, заявленная производителем 30м).
На базе WirenBoard нами построены несколько проектов по распределенному мониторингу температуры и влажности в сети магазинов и на складах. Данные с объектов передаются через интернет в сервис телеметрии. Сервис предоставляет клиентам доступ к личным кабинетам с данными, отчетами по каждому контролируемому объекту.
Мы будем рады ответить на вопросы по этому замечательному контроллеру. Телефон +7 961 421-03-07.
Источник



