- ПЛК нового поколения WirenBoard на базе Linux
- SMH2G(i) — мощный свободно программируемый панельный контроллер c ОС Linux
- Решайте проблемы на объекте не выходя из офиса
- Рост производительности это отсутствие ограничений для программиста
- Шлюзы промышленных протоколов обмена на Linux. Собери сам
- Linux-контроллер UCDK: адаптируем к задаче
- Начало проекта: использование готового устройства
- Старт за час: программирование на виртуальной Linux-машине
- Что? Где? Когда? Распределение памяти
- Драйверы: лучше, когда они уже есть
- Начните с модификации демонстрационных программ
- Выйдите на рынок первыми
- Заключение
- Литература
- AMOS-3001 — индустриальный безвентиляторный компьютер умещается на ладони
ПЛК нового поколения WirenBoard на базе Linux
Контроллер автоматизации WirenBoard от наших партнеров ООО «Бесконтактные устройства»— очень гибкое решение для автоматизации, предназначенное для широкого круга задач. Контроллер представляет собой одноплатный компьютер с большим количеством как проводных так и беспроводных интерфейсов, заменяя собой множество устройств! Работает ПЛК под управлением широкого распространенной операционной системой Linux семейства Debian, что открывает перед инженерами большие возможности.

Контроллер нового поколения для автоматизации WirenBoard
Среди проводных интерфейсов следует отметить широко распространенный интерфейс 1-wire, RS-485 с поддержкой modbus «из коробки», релейные выходы и многое другое.
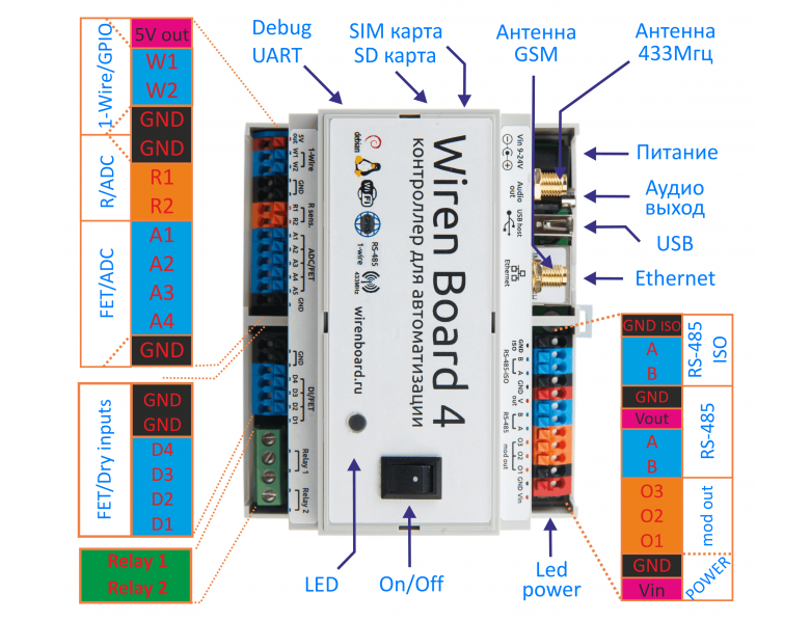
Порты контроллера WirenBoard
На базе WirenBoard можно легко строить беспроводные системы мониторинга температуры и влажности, т.к. прибор поддерживает работу с датчикам OREGON Scientific. После доработки датчиков OREGON Scientific нашими инженерами, дальность связи может быть увеличена до 100м. (Стандартная дальность, заявленная производителем 30м).
На базе WirenBoard нами построены несколько проектов по распределенному мониторингу температуры и влажности в сети магазинов и на складах. Данные с объектов передаются через интернет в сервис телеметрии. Сервис предоставляет клиентам доступ к личным кабинетам с данными, отчетами по каждому контролируемому объекту.
Мы будем рады ответить на вопросы по этому замечательному контроллеру. Телефон +7 961 421-03-07.
Источник
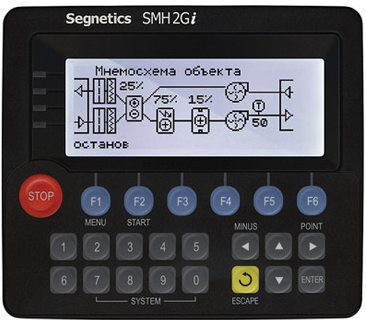
SMH2G(i) — мощный свободно программируемый панельный контроллер c ОС Linux
Благодаря встроенной ОС Linux сфера применения контроллера SMH2G(i) существенно расширяется:
- В стандартный для Linux набор входят языки C/C++, Perl, Python, PHP, Ruby, и даже ассемблер. Это дает вам возможность написания собственных программ, драйверов и протоколов для обмена данными с устройствами, не поддерживающими ModBus.
- Наличие файловой системы. Проект SMLogix теперь виден как набор файлов.
- Вы можете перенести свои предыдущие программные разработки на контроллер SMH2G(i).











Решайте проблемы на объекте не выходя из офиса
В связке Эксплуатация/Подрядчик всегда была потребность определять причины возникающих проблем и решать их дистанционно, без лишних выездов подрядчика на объект. Подключенный к Internet контроллер SMH2G(i) имеет все возможности эту потребность реализовать. Теперь вы можете:
- Обновить ПО, как удаленно в SMLogix, так и с самого контроллера, через сервисный режим.
- Настроить объект в режиме отладки в SMLogix – снять характеристики объекта, перерасчитать коэффициенты ПИД, задать их и проверить, как регулируется температура.
- Загрузить проект в SMLogix в режиме отладки и диагностировать проблему.
- Обнаружив и исправив ошибку, – загрузить в контроллер новый проект.
Больше не нужно подключаться к контроллеру через конвертер. Встроенный Ethernet дает возможность загружать проекты из локальной сети и автоматически обновлять ПО с сервера Сегнетикс, просто выйдя в Интернет.
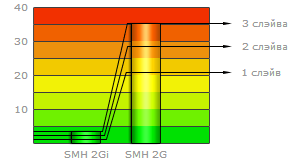
Рост производительности это отсутствие ограничений для программиста
Характеристики SMH2G(i) позволяют добавлять прикладные пользовательские функции без потерь времени выполнения программы.
Контроллер SMH2G – 3 тысячи блоков
Контроллер SMH2G(i) – 10-15 тысяч блоков

Мы постоянно увеличиваем максимальное количество блоков в проекте. На контроллере SMH2G максимум был ограничен 3-4 тысячами, на SMH2G(i) он – 10-15 тысяч и, в будущем, будет еще больше. Больше блоков – сложнее программы.
Контроллер SMH2G – 10 циклов/сек
Контроллер SMH2G(i) – 100 циклов/сек

Написать программу, которая превысит цикл в 80 мс и замедлит работу системы, практически невозможно. Типовая программа, которая выполнялась на контроллере SMH2G за 100-130 мс, на SMH2G(i) выполняется за 10 мс.
Цикл программы, мс
Производительность SMH2G(i) позволяет подключать периферийные устройства без увеличения времени выполнения проекта.

Больше вы не столкнетесь с тем, что сложные проекты SMArt, с большим количеством картинок и нестандартных шрифтов, не помещаются в память контроллера.
0-36В DC (для выходов на основе транзисторов)
Источник
Шлюзы промышленных протоколов обмена на Linux. Собери сам
Я занимаюсь разработкой, внедрением и эксплуатацией систем автоматического управления технологическими процессами (АСУ ТП). Поначалу работал со SCADA-системами. Потом довольно быстро переключился на работу с протоколами обмена промышленных устройств. Как самостоятельное написание драйверов, так и настройка систем сбора данных. В настоящий момент моя работа проходит атмосфере Modbus-ов, МЭКов-101/104-х, ОРС и прочих протоколов.

Рис. 1. Многообразие протоколов обмена, используемых в АСУ ТП
Кратко о том, как устроена типичная система сбора данных (Немного упрощенно).
Рис. 2. Система сбора данных
Специальное ПО, называемое OPC-сервером ведёт опрос устройств, подключенных к интерфейсу RS-485. OPC-сервер является своего рода прослойкой между SCADA-системой и устройствами, переводя язык на котором общаются устройства в язык, понятный SCADA-системе. Преобразователь Ethernet/RS-485 служит для преобразования TCP/IP-пакетов в пакеты, которые ходят по физической среде RS-485.
Эта схема имеет ряд недостатков:
- Установим, например, в ОРС-сервере таймаут ожидания ответа 200 мс. В идеальном случае, когда пакеты в Ethernet ходят без задержек, обмен с устройствами идёт с хорошей скоростью (интенсивностью). Но если пакет, содержащий ответ, задерживается, например, на 300 мс (это больше таймаута ожидания ответа 200 мс), то ОРС-сервер считает, что ответ на запрос не пришел и отправляет следующий запрос. В это время приходит ответ на предыдущий запрос, но ОРС-сервер думает, что это пришел ответ на текущий запрос и передаёт неправильные данные наверх. Как результат данные на АРМе «скачут». Чтобы уйти от таких ситуаций установим таймаут больше. Возьмём с запасом — 3000 мс. Если ответ приходит раньше 3000 мс, то оставшееся время не ждём, переходим к следующему запросу. Пока всё идёт хорошо, но стоит нескольким устройствам перестать отвечать, как образуются задержки по 3000 мс на каждое устройство. Время опроса увеличивается.
- Большинство протоколов, используемых в АСУ ТП (Modbus, счетчики э/э) основываются на последовательном опросе одних и тех же параметров. Учитывая, что большую часть времени значения параметров остаются неизменными, сеть передачи данных используется для передачи одного и того же. Это нерационально, если среда передачи GPRS, и трафик стоит денег. Кроме того, в среде передачи GPRS задержки прохождения пакетов могут достигать нескольких секунд. Зачем тратить время и ресурсы для передачи одного и того же?
Для вышеперечисленных ситуаций более подходит протокол, в котором данные передаются наверх по изменению (спорадически) и сгруппированными по несколько значений в один TCP-пакет. Такими протоколами являются МЭК-60870-5-104 и OPC UA. Подойдёт и ModBus-TCP, в нём нет передачи по изменению, но зато, если данных немного, их можно упаковать в один пакет. Хорошо бы иметь какой-нибудь контроллер, который можно повесить на DIN-рейку, подключить к нему устройства по RS-485 и передавать данные по Ethernet в SCADA-систему.
В общем какие-то аппаратные шлюзы есть и в немалом количестве. Но в виде готовых неделимых решений. Всё в одном. И это мне не особо нравится. Понадобился мне когда-то шлюз, преобразующий протоколы счетчиков СЭТ-4ТМ в OPC UA с шестью портами RS-485 и двумя Ethernet. У одного производителя есть шлюз с поддержкой нужных протоколов обмена, но мало портов RS-485, у другого есть нужное количество портов RS-485, но нет двух портов Ethernet. У третьего есть два порта Ethernet, но нет всех протоколов обмена. У четвёртого есть почти всё, но нет OPC UA, имеющиеся на борту МЭК-60870-5-104 или ModBus-TCP требуют ОРС-сервера для этих протоколов.
А как бы было замечательно: купить контроллер или мини-ПК с ОС у одного производителя. Купить ПО для контроллера у другого. Если одного производителя ПО не поддерживает что-то, докупить что-то из ПО у другого, объединить между собой компоненты ПО через стандартный программный интерфейс. Казалось бы, вот оно светлое будущее!
Вот поэтому шлюзы протоколов применяются реже чем связка «ОРС-сервер и «Преобразователь Ethernet в RS-485»» — из-за их неделимости на компоненты.
Одна из причин, почему мало развиты SCADA для Linux: SCADA есть, протоколов обмена в ней поддержано мало, а ОРС-серверов для связи с оборудованием нет. SCADA оставляет интегратора один на один с железом.
Читатель уже может задавать вопрос: Что можете предложить? Что уже есть? Есть OPC UA серверы для Linux для следующих протоколов:
- МЭК 60870-5-104;
- МЭК 60870-5-101;
- Счетчики Меркурий 230, 231, 233, 234, 236;
- Счетчики СЭТ-4ТМ, ПСЧ-3ТМ, ПСЧ-4ТМ;
- Счетчики Энергомера;
- SNMP;
- MQTT;
- Счетчики Меркурий 200.
Чтобы на верхний уровень можно было передавать данные не только по протоколу OPC UA, создан «Преобразователь OPC UA в Modbus и МЭК 60870-5-104». Помимо функции передачи данных по этим протоколам, «Преобразователь» имеет встроенный web-сервер. С помощью специального редактора можно нарисовать схему, на неё вывести значения тэгов, а потом открыть её в браузере. Получается мини-SCADA непосредственно в контроллере. Как работает оживление схемы я уже писал здесь, про редактор здесь. В будущем планируется «Преобразователь OPC UA в MQTT».
OPC UA серверы и преобразователь работают на архитектурах x64, ARMv7 и AARCH64.
Таким образом, для аппаратной части можно использовать как проверенные временем решения на базе мини промышленных компьютеров, так и всевозможные «raspberry pi совместимые» ARM миникомпьютеры. Как производится установка и настройка ПО с примерами можно почитать здесь или здесь.
В общем виде структура комплекса выглядит так:
Система обладает масштабируемостью. Используются компоненты необходимые только для решения текущей задачи.
С использованием OPC UA сервера наша схема преобразуется:
У нас получилось следующее:
- OPC UA сервер собирает данные с устройств по RS-485 без больших задержек между запросами;
- Данные в SCADA выдаются по нескольку штук в одном TCP-пакете по изменению;
- К OPC UA серверу можно подключить несколько одинаково настроенных АРМов. Пригодится, если нужно дублирование.
Таким образом, вместо связки ОРС-сервер и «Преобразователь Ethernet в RS-485» у нас получается одно устройство, объединяющее в себе их функциональность. Мне такая схема нравится больше. А Вам?
Источник
Linux-контроллер UCDK: адаптируем к задаче

В институте, где я учился, преподает профессор, который не устает повторять студентам, что инженер должен разрабатывать «оборудование в корпусе, а не в принципе». В свете недавнего кризиса я бы добавил: «за три месяца, а не в ближайшее время». Эта статья для тех, кто разделяет такую точку зрения, кто планирует разработать устройство с определенной функциональностью и за конкретный срок, используя в нем операционную систему (ОС) Linux. Целесообразность использования Linux проверить просто: если устройство должно подключаться к Интернету и поддерживать сложные протоколы обмена, если Вы хотите использовать программы, написанные другими программистами, и не хотите покупать средства отладки и лицензии, то ваша следующая разработка должна быть сделана на Linux-e.
Да, чуть не забыл сказать про Windows TM CE, VxWorks TM и подобные ОС. Как правило, все эти системы платные, либо требуют лицензионных отчислений с продаж. И, если Вы не знаете однозначных аргументов в пользу использования какой-либо из них, то стоит начать с полностью открытой и бесплатной ОС. Зачем платить, когда это не обязательно? Выбрав платную ОС, Вы обрекаете себя на постоянные отчисления разработчикам (на обновления, на новые библиотеки и т.п.).
Перед тем как перейти к делу, оговорюсь: статья построена на описании конкретного устройства — контроллера UCDK, которое может быть использовано в:
- Промышленной автоматизации;
- Системах класса «умный дом»;
- Системах учета энергоресурсов (АСКУЭ, АСТУЭ);
- Охранно-пожарных системах;
- Системах мониторинга работы и дистанционного управления оборудованием (связь, торговля, рекламные стенды, автоматы для продажи еды и платежные терминалы).
Несмотря на то, что в статье описан определенный продукт, в ней приводятся базовые стадии проекта, знакомство с которыми может быть полезными всем разработчикам, начинающим свой первый Linux-проект.
Начало проекта: использование готового устройства
Времена, когда разработка сложного устройства начиналась с покупки микросхем и монтажа платы собственной разработки, канули в прошлое лет пять назад. Примерно с того момента, когда отладочные средства стали стоить в разы меньше месячной зарплаты инженера. Сегодня разработку разумно начинать с выбора отладочной платы с периферией, максимально близкой к продукту, который предстоит разработать (рис. 1). Причем цена имеет меньший приоритет по сравнению с количеством нужных интерфейсов и периферии, ведь расходы на разработку любого блока собственными силами обойдутся значительно дороже.
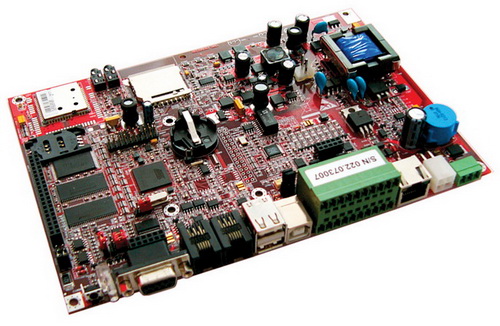
Рис. 1. Плата контроллера UCDK
В первую очередь, однако, стоит уделить внимание наличию в составе отладочного комплекта исходных текстов операционной системы и драйверов для периферии — Board Support Package (BSP). Если их нет, или есть только бинарные образы, то помните, что исходные коды придется покупать дополнительно или «собирать» самостоятельно. «Собирать» есть из чего, ведь Linux — это открытая система, однако дело это долгое и требующее высокой квалификации. Например, нашей компании потребовалось полгода, чтобы запустить и отладить ядро, а также написать BSP для первого продукта.
Также следует обратить внимание на техническую поддержку от разработчика. Возникающие вопросы можно решить в десятки раз быстрее, если есть с кем проконсультироваться. Поэтому рекомендую всем использовать российские средства отладки: разработчики ближе и говорят по-русски.
Если Вы планируете разработку в области промышленной автоматизации, обратите внимание на контроллер UCDK производства компании «НПК Свитрон», который поставляется как в виде отдельной платы, так и в четырех видах корпусов. Контроллер UCDK имеет следующие технические характеристики (таблица 1).
Таблица 1. Технические характеристики контроллера UCDK
| Процессорное ядро | Процессор | Atmel, AT91SAM9G20-CU (ARM9, 400 МГц) |
| SDRAM | 64 Мбайт, 2 x K4S561632J-UI75 | |
| FLASH | 128 Мбайт, K9F1G08UOB (NAND) | |
| Сетевые интерфейсы | Ethernet | 1xEthernet 10/100 Мбит/с (KSZ8721CL) (опционально РоЕ) |
| GSM* | 1xGSM/GPRS (HiLo NC, Sagem) | |
| Интерфейсы | 4 UARTs: 1хRS-232 (Rx+Tx), 1x RS-232/RS-485 (2 wire), 1xRS-485/CAN (2 wire), 1xTTL (Rx+Tx) | |
| 2xUSB-Host, 1xUSB-Slave | ||
| Датчики | два порта 1-WireTM: до 20 цифровых датчиков на порт | |
| Входы | восемь изолированных* и восемь неизолированных входов | |
| Питание | Неизолированный блок питания | 9…28 В DC |
| Изолированный блок питания* | 36…75 В DC (опция 18…75 В DC) | |
| Потребляемая мощность | В минимальной комплектации | 2,5 Вт |
| В максимальной комплектации с учетом зарядки аккумулятора | До 20 Вт | |
| Характеристики | Диапазон рабочих температур | -40…70°С |
| Габаритные размеры платы | 203х141 мм | |
| Дополнительно* | Блок зарядки аккумулятора (BQ24702, TI), держатель SD-карты, звуковая подсистема (WAU8812YG, Nuvoton) | |
| Датчики | Дополнительно могут быть поставлены цифровые датчики: температуры, дыма, влажности, освещенности, переменного и постоянного напряжения | |
На UCDK установлена операционная система Linux 2.6.27. В комплект поставки входит DVD-диск, содержащий образ виртуальной машины, на котором уже записаны необходимые компиляторы и загрузчики, исходные тексты ОС, необходимые драйверы и примеры программ.
Контроллер UCDK является полностью открытой платформой — все исходные коды и схемы записаны на DVD-диск, а обновления и исправления доступны из Интернета.
Старт за час: программирование
на виртуальной Linux-машине
Работа программиста над новым проектом начинается с установки отладочных средств и их настройки. Часто разработчику надо разобраться, почему система не собирается из исходных текстов поставки. Для этого требуется установить все обновления и надстройки, подобрать правильные ключи компиляции и т.п. В итоге, чтобы просто скомпилировать исходные коды, уходит несколько дней.
Комплект поставки UCDK использует технологию виртуальной машины (ВМ) [1] и разработан для максимально быстрого старта у заказчика. ВМ, входящая в поставку UCDK, представляет собой программную систему, эмулирующую аппаратное и программное обеспечение машины разработчика, на которой уже установлены все необходимые для работы и гарантированно совместимые компиляторы и загрузчики.
При этом для компиляции всех исходных кодов разработчик должен:
- Разархивировать образ ВМ на диск своего компьютера;
- Установить среду запуска ВМ;
- Запустить ВМ (при этом на WindowsTM-машине запустится виртуальная машина Debian Linux);
- Перейти в папку проекта (он также записан на ВМ) и выполнить команду «make all»;
В результате будут скомпилированы четыре бинарных файла-образа для загрузки в память контроллера.
Согласитесь, что начинать работу с полностью работающим проектом значительно удобнее. Ведь изменять быстрее, чем разбираться, как запустить.
Что? Где? Когда? Распределение памяти
Контроллер UCDK использует микросхему памяти NAND Flash объемом 128 Мбайт, которая логически разделена на блоки (partition) следующим образом (таблица 2).
Таблица 2. Деление на блоки контроллера UCDK
| Блок (MTD partition) | Размер, байт | Название | Описание |
|---|---|---|---|
| /dev/mtd0 | 128k | Bootstrap | Начальный загрузчик (0-го уровня) |
| /dev/mtd1 | 256k | uboot | Загрузчик ядра (1-го уровня) |
| /dev/mtd2 | 256k | uboot environment | Настройки окружения |
| /dev/mtd3 | 128k | – | Не используется |
| /dev/mtd4 | 128k | – | – |
| /dev/mtd5 | 128k | – | – |
| /dev/mtd6 | 2M | kernel | Ядро Linux в сжатом виде |
| /dev/mtd7 | 2M | – | – |
| /dev/mtd8 | 123M | root filesystem | Корневая файловая система (JFFS2) |
При включении питания управление передается начальному загрузчику Bootstrap, который устанавливает частоту работы процессора, настраивает порты ввода/вывода, подсистему watchdog и т.п. Далее управление получает загрузчик ядра U-Boot. Кроме функций распаковки и запуска ядра Linux, U-Boot предоставляет возможность настроить индивидуальные параметры модуля: МАС-адрес, серийный номер платы, распределение Flash и т.п. с использованием командной строки. Настройки, сделанные в U-Boot, сохраняются в разделе uboot environment. Они будут доступны системе при загрузке и во время работы ОС Linux. После запуска ядра Linux система становится похожей на обычный персональный компьютер. Она использует раздел root filesystem для хранения файлов. В этом разделе хранятся все драйвера, пользовательские и системные программы.
UCDK поставляется с загруженной микросхемой Flash-памяти. Пользователь может запускать программы, модифицировать и удалять файлы, записанные в корневой файловой системе UCDK. Эта файловая система использует раздел mtd8 во Flash и имеет тип JFFS2 (Journaling Flash File System version 2) [2].
Для ускорения разработки можно переключить UCDK на использование файловой системы NFS (Network File System), физически расположенной на диске персонального компьютера (рис. 2).
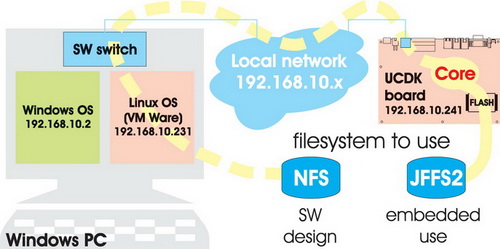
Рис. 2. Доступ к файловым системам из UCDK
Использование NFS позволяет:
- Увеличить объем памяти контроллера (NFS хранится на диске компьютера). Увеличение особенно полезно при установке стандартных пакетов командой apt-get (см. ниже);
- Существенно ускорить работу, связанную с частыми компиляциями программ. После компиляции программы на ВМ и ее копирования в папку NFS она сразу становится видимой из контроллера (перезагрузка не требуется).
Переключение между файловыми системами производится настройкой в U-boot.
Запись файлов-образов в NAND flash-контроллера осуществляется c использованием бесплатного пакета SAM-BA (Atmel Corporation) через интерфейсы USB Slave или JATG, а файла rootfs — по Ethernet.
Драйверы: лучше, когда они уже есть
Как уже отмечалось выше, ключевым фактором при выборе отладочной платы является наличие необходимых в вашем проекте интерфейсов. Этот фактор приобретает еще больший вес, если вместе с платой поставляются драйверы. Написать драйвер под Linux — дело, в принципе, несложное. Однако, оно требует опыта и знаний архитектуры Linux [3]. Кроме того, требуется время на его тестирование и отладку. И не стоит «утешать» себя мыслью, что для Linux есть все драйверы. Это верно, но интеграция свободно распространяемого компонента в вашу систему потребует значительного времени. Сначала новый драйвер работать не будет. Потребуется основательно разобраться в теме, чтобы через неделю-другую «сражений» исправить пяток ключевых строк.
В комплект поставки UCDK входят следующие драйверы:
- Драйверы последовательных портов. Для CAN и RS-485 переключение направления передачи- автоматическое;
- Драйвер для микросхемы Ethernet PHY, подключенной по шине RMII;
- Драйвер часов реального времени (RTC);
- Драйвер подсистемы WatchDog;
- Поддержка 2хUSB- host;
- Драйвер шины I 2 C;
- Драйвер цифровых входов;
- Драйвер опроса и управления GPIO-процессора (управление светодиодами, кнопка, состояние SIM-карты и т.п.)
В UCDK все драйверы поставляются в исходных кодах. Их можно свободно модифицировать под вашу задачу.
Используйте программные пакеты и пакетные менеджеры
При работе с Linux программист должен быть хорошим читателем, мастером «copy-paste» и, только в небольшой степени, «Си-писателем». Основная прелесть Linux состоит в том, что для нее уже написано огромное число различных программ. Для установки, обновления и удаления программных пакетов в операционной системе Debian Linux (установленной в UCDK) используется пакетный менеджер Advanced packaging tool (apt). Он предназначен для автоматической установки, настройки и удаления программ из предварительно откомпилированных пакетов или из исходных кодов [4]. Пакеты берутся из так называемых репозиториев — хранилищ в Интернет, либо устанавливаются с внешних носителей.
Аpt (apt-get) значительно упрощает процесс установки программ. Например, для установки игры типа «тетрис» на UCDK следует ввести: apt-get update (обновление базы данных пакетного менеджера); apt-get install tint (установить приложение).
По умолчанию на UCDK записаны два программных пакета:
- One Wire File System (OWFS). Используется для работы с цифровыми датчиками по протоколу 1-WireTM;
- Apache2. Самая распространенная в мире платформа для WEB-серверов.
Перед тем, как приступать к написанию той или иной программы, проверьте, возможно, программный пакет с такими функциями давно существует и развивается. Используйте его, будь то агент сетевой системы управления SNMP, база данных или конвертер форматов.
Начните с модификации демонстрационных программ
В комплект поставки UCDK входит несколько демонстрационных программ:
- Работа с последовательными портами;
- Пример для работы с WatchDog;
- Hello world! (куда же без него).
Начните эксперименты с их редактирования, компиляции и запуска. Описание UCDK содержит пошаговые инструкции по их компиляции и запуску.
Выйдите на рынок первыми
Мир электроники развивается все быстрее, и ключевым фактором выхода на рынок становится скорость создания продуктов. Именно поэтому мы предлагаем контроллер UCDK не только в виде платы, на которой Вы можете отладить свое решение, но и в виде законченного устройства в корпусе (см. таблица 3)
Таблица 3. Конструктивные исполнения контроллера UCDK
 |  |  |  |
| Стальной, на DIN-рейку (216×42,5×150 мм) | Стальной 1U «MiniRack» в 19’ стойку (440x44x245 мм) | Пластиковый, настольн./настен. (216х44х152 мм) | Алюминиевый, класс защиты IP67 (298х168х77 мм) |
Кроме контроллеров UCDK «НПК Свитрон» предлагает внешние цифровые датчики температуры, влажности, освещенности, напряжения, адаптеры для подключения двухпроводных датчиков дыма и внешние реле. Все датчики поставляются в пластиковых корпусах и подключаются к UCDK по интерфейсу 1-WireTM.
Возможно, что у нас нет 100% требуемой Вам функциональности, однако для пилотного проекта ее может оказаться достаточно. Использовать готовое решение на старте — значительно дешевле и быстрее.
Ну а дальше — есть альтернативы. Если проект небольшой, то можно построить его на контроллерах в их текущем виде. Благодаря дополнительным разъемам на плате UCDK возможно расширение функциональности с использованием дочерних плат. Если же проект большой, требующий существенных изменений, то оправдана новая разработка аппаратной части.
Заключение
Надеемся, что эта статься приблизила Вас к началу использования Linux в ваших решениях. В следующих статьях мы планируем рассказать об открытых проектах, сделанных на нашей платформе, а также о коммерческих решениях, сделанных совместно с нашими партнерами.
Литература
2. Jonathan Corbet, Alessandro Rubini, Greg Kroah-Hartman. Linux Device Drivers, Third Edition. O’Reilly Media, 2005. — 640 с.
Получение технической информации, заказ образцов, поставка — e-mail: automation.vesti@compel.ru

AMOS-3001 — индустриальный безвентиляторный компьютер умещается на ладони

На склад КОМПЭЛ поступил миниатюрный индустриальный компьютер AMOS-3001-1E10A1 производства VIA Technologies, Тайвань. Компьютер выполнен во встраиваемом индустриальном корпусе и может работать в интервале температур от -20 до 70°C. Компьютер абсолютно бесшумен, так как в нем нет никаких движущихся элементов. Ядром системы является малопотребляющий процессор 1,0 ГГц VIA Eden TM ULV с низким тепловыделением, что позволило отказаться от активной системы охлаждения (нет вентиляторов). Вместо жесткого диска использован твердотельный SSD-накопитель. Большое количество внешних интерфейсов (HDMI, LAN, 4xUSB, 1xRS-232, 1xRS-232/422/485/GPIO) позволяет использовать компьютер в широком спектре приложений. AMOS-3001-1E10A1 поставляется с предустановленной ОС Windows XP.
- Размер, мм: 150,0х45,0х108,0
- Рабочая температура, °C: -20…70
- Тактовая частота процессора 1,0 ГГц
- ОЗУ — 1ГБ RAM
- SSD — 2ГБ
- 3D/2D AGP графика MPEG2
- Внешний блок питания в комплекте
- ОС Windows XP
Основное преимущество компании VIA Technologies — производство высокоэффективных микропроцессоров VIA Nano, VIA C7 и VIA Eden, встраиваемых материнских плат на базе архитектуры x86, малопотребляющие миниатюрные индустриальные компьютеры, предназначенные для решения широкого круга задач на производстве и в M2M-проектах.
Источник



