- Как подключить кучу старого RS232 оборудования по USB без регистрации и sms (STM32 + USB-HID)
- Вместо вступления
- Зачем?
- Пробуем что-то сделать
- Low Level
- High level
- Заключение
- USB-Serial Port adapter (RS-232) in Ubuntu Linux
- USB to RS 232 driver Linux
- Other Issues:
- Работа с СОМ-портом на Си в linux
- ▍ Основы ввода-вывода в linux: всё есть файл
- Файл-устройство COM-порта
- ▍ Работа с файл-устройством терминала
- ▍ Создадим настоящее устройство передачи данных
- ▍ Простейший пример блокирующего чтения из СОМ-порта
- ▍ Программные способы перехвата сообщений в порту
- ▍ Как сделать неблокирующее чтение?
- ▍ Как подрыгать ножкой DTR и RTS, а также пара слов о RS-485
- ▍ Выводы
Как подключить кучу старого RS232 оборудования по USB без регистрации и sms (STM32 + USB-HID)
Вместо вступления
Как обычно я предлагаю заняться странным — попробовать подключить несколько старых RS232 устройств, через один USB порт с помощью синей изоленты и смекалки. Статья не будет большой, скорее это описание что где взять и зачем вообще все это делать.
Зачем?
Нужно это бывает когда некий специальный аппаратный комплекс, состоящий из отдельных устройств и который выполняет какую-то единый функционал, вдруг начинают модифицировать. Разумеется что можно попробовать найти комплекс оборудования по новее, но в реальной жизнь на это идут очень редко. Начинают модифицировать то что есть. Иногда вдумчиво, но чаще как получится.
Как правило «мозгами» такого комплекса является компьютер у которого 100500 выходов RS232. Из примеров могу привести место кассира в супермаркете, банкоматы и тому подобное. С первым случаем столкнулся я.

Эти компьютеры не блещут мощностью, но отличаются космической стоимостью. Естественно он перестает отвечать требованиям современных технологий и многим приходит в голову идея заменить их на обычный ПК и получить приличную мощность по адекватной цене, однако быстро выясняется что RS232 на новых ПК вымер как класс. Теперь этот интерфейс стал сугубо специализированным. Соответственно надо или самостоятельно прикручивать кучу RS232 или искать уже готовое спец решение.
Разумеется что можно заменить само оборудование, но если вы посмотрите сколько стоит стационарный лазерный сканер приличной фирмы и помножите эту цену на их количество то передумаете.
Люди не посвященный в тему сразу радостно покупают пучок китайских USBtoRS232 переходников, а дальше все идет очень печально. Лучше этого не делать. Вторым вариантом является покупка специализированной платы расширения с кучей RS232. Этот вариант уже лучше и имеет право на жизнь, но тоже имеет свои недостатки. Например стоимость и проблемы с дровами если используется не Windows или не та версия. Так же не маловажным фактором является доступность в будущем, так как что-то выходит из строя и парк может расширятся в будущем. Потом оказывается что конкретная модель уже не выпускается или не постановляется в конкретную местность и т.д. В общем привязывать себя к конкретному устройству это всегда опасно, особенно если можно этого не делать.

Пробуем что-то сделать
Может показаться странным что примитивные RS232 устройства так сложно и дорого подключить по нормальному если по сути там обычно простые протоколы и примитивный физический уровень. А все потому что обычно подобные аппаратные комплексы используются в коммерческих доходных сферах и покупка оборудования по таким ценам оправдана, а само оборудование уже перешло в разряд специального. Спец оборудование = спец цена вопроса.
Однако все это не мешает попробовать собрать свой бюджетный велосипед. Бонусом получим возможность менять поведение такого своеобразного RS232 мультиплексора и полностью обойдем проблему написания USB драйверов. HID профиль поддерживается почти везде.
Однажды я прочел отличную статью автора RaJa До этого я интересовался USB, но до практики не доходило. В наличии у меня было несколько дешевых отладочных плат, китайских клонов Blue Pill на микроконтроллере Stm32f103c8t6. Сама история и идея создания этой платы очень интересная, стоит поинтересоваться.
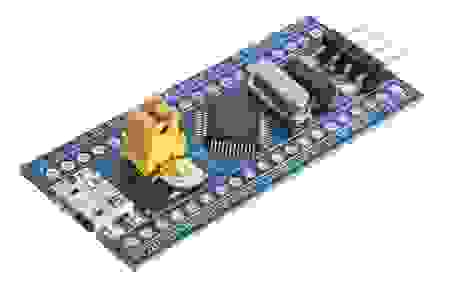
Этот микроконтроллер отличается тем что имеет три UART и аппаратную поддержку USB. Это то что может быть нам интересно в разрезе нашей задумки, а вообще микроконтроллер на этой плате, работает на частоте 72Mhz и по характеристикам порвет любое Arduino схожего формфактора. Но самое главное преимущество это повсеместная распространенность этой платы. Я не знаю более простых и дешевых способов пощупать «железный» USB.
Добавив три дешевых преобразователя RS232toUART MAX2323 и немного «рассыпухи» можно собрать своеобразный конвертер интерфейса 3хRS232 USB. 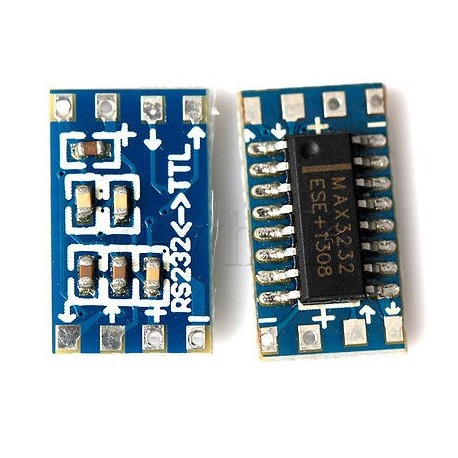
В моем случае нужно было подключить три RS232 устройства к Raspberry Pi 3. Если использовать обычные RS232 USB переходники то в итоге сталкиваешься с тем что в системе куча одинаковых устройств к которым не понятно что подключено и все это дико глючит, а выглядит еще более печально.
Если вы немного капнете в сторону какие микросхемы USB to UART доступны повсеместно, то обнаружите что там полно подделок. Думаю не стоит объяснять как это все потом себя ведет с оригинальными драйверами. И никто не сможет гарантировать вам что даже брендовые переходники вдруг не закупят левую партию микросхем. Удешевление производства оно происходит повсеместно.
В итоге придумалась примерно такая простая схема коммутации ее даже можно изобразить в стиле Arduino:

Я отломал резистор который подтягивает D+ к питанию и сделал эту подтяжку управляемой с помощью транзистора. Она отвечает за опознание устройства на USB шине.
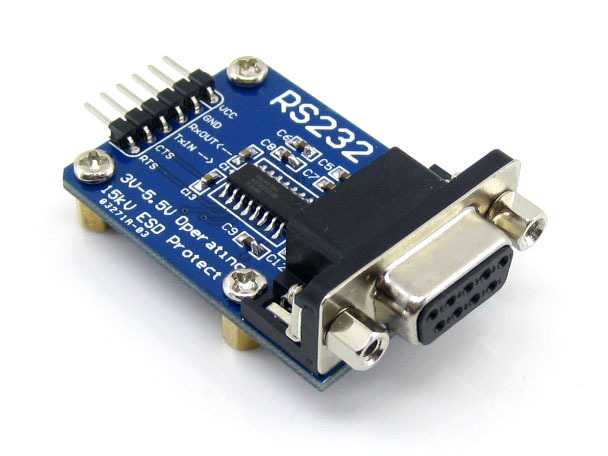
Распиновка разъемов RS232 в программе (Fritzing) где я набрасывал схему странноватая, но думаю никому не составит труда найти ее в интернете, контакты задействованы как обычно 2,3 и 5. А еще удобнее будет использовать платы конвертера UART to RS232 котором уже присутствует разъем RS232.
Low Level
Код для микроконтроллера я писал и отлаживал с помощью IDE EmBitz (если честно то я был удивлен как легко завелась эта IDE, особенно после танцев с бубном вокруг CooCox. ). За основу взял проект из статьи выше. Это первый пример который у меня заработал сразу после заливки.
Я добавил работу с тремя UART и изменил структуру HID репортов так чтобы обмен с ПК шел всегда по 64 байта с контрольной суммой (crc8).
Попытался организовать автопереподключение устройства если соединение по USB не прошло корректно. Не претендую на супер алгоритм, должен признать что не являюсь специалистом по USB. Отдельный транзистор, отображенный на схеме, управляемый отдельным пином B5 подтягивает одну из сигнальных линий USB к питанию что имитирует включение устройства и хост проводит инициализацию устройства. Если попытка не удачная то происходит переподключение.
Было замечено что в Linux (Raspbian) процент не успешных подключений значительно меньше чем в Win 10, возможно этот результат получился из-за моих локальных технических условий.
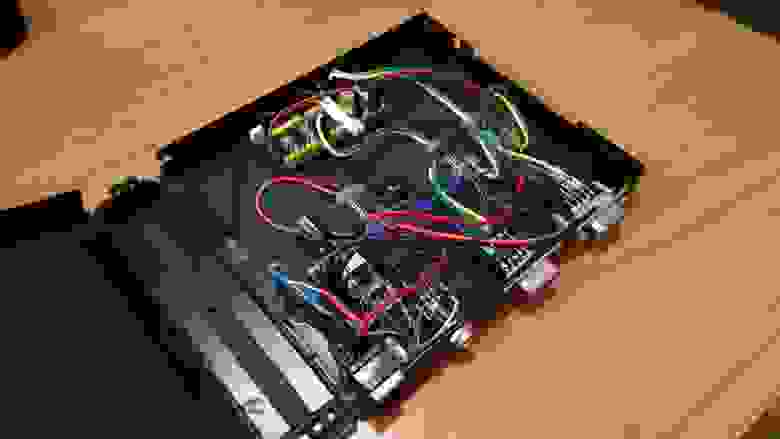
Общий алгоритм похож на примитивный маршрутизатор, принимая пакет по USB мы смотрим какому UART оно предназначено и пересылаем туда, в обратную сторону аналогично. Есть немного обработки самих пакетов но это относится к конкретному RS232 оборудованию которое я подключал. Это были: экран покупателя Datecs dpd-201, стационарный лазерный сканер штрихкодов Datalogic Magellan 8300 и весы Digi DS890.
На фото выше тестовый образец устройства содержит еще DC-DC шим преобразователь питания на микросхеме MP2307. 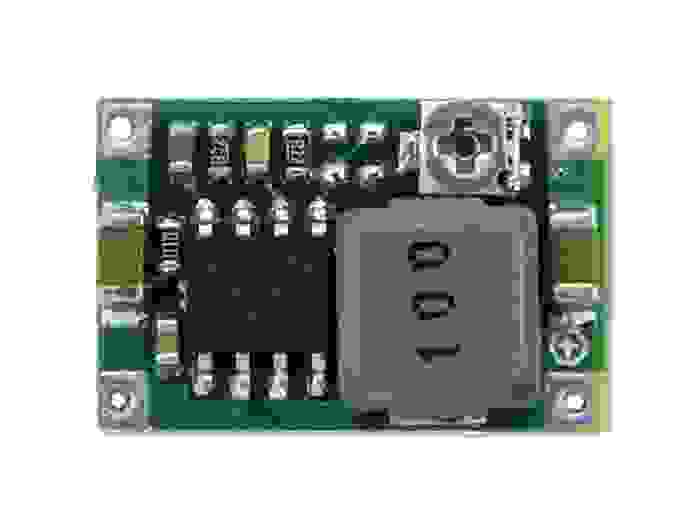
Это нужно для того чтобы питать устройство от напряжения 10-24В (входное) и иметь возможность подключить дисплей покупателя который питается от такого же напряжения. После DC-DC шим преобразователя поулчаем 3.3В для всех остальных модулей. Для этого дисплея так же установлен «телефонный» разъем вместо RS232, не хотелось перепаивать стоковый штекер.
High level
Вторая часть софта это примеры и тесты собранные в сумбурный проект на Java написанный IDE IDEA. Предполагается что работа с устройством интегрируется в софт высокого уровня используя различные обертки по работе с USB стеком в зависимости от языка на кортом этот софт пишется. Сейчас сложно найти такой ЯП чтобы под него не существовало таких оберток. Отдельно для староверов отмечу что java и usb совместимы если готовить правельно, это доказано практикой и используется в коммерческом проекте.
В процессе тестирования выяснилось что работа в Linux и Windows с USB HID несколько отличается, работа отлаживалась через две библиотеки usb4java и hid4java. Работа через последнюю используется в Linux (Raspberry Pi 3).
Разница заключается в том что в Windows можно обратится напрямую к USB устройству даже если оно зарегистрировано как HID и писать\читать его конечные точки (endpoint). В Linux же приходится работать с hid устройством. То есть устанавливается стандартный драйвер hid и всё, работайте только с ним пожалуйста. Работа таким образом происходит немного медленнее чем напрямую, но напрямую тоже возможно если убедить систему не ставить драйвера. Это реально.
Как и обещал не растягиваю статью и не привожу подробное описание кода, те пару человек кому интересно могут посмотреть проекты и поиграться в живую, а остальным думаю будет полезнее принять к сведению что есть такое решение и прибегнуть к более глубокому изучению в случае необходимости.
Заключение
Представленное устройство это лишь одни из примеров как довольно легко можно приобщится к процессу создания нативных USB устройств и перестать наконец использовать переходники.
Не забываем плюсовать RaJa автора статью в которых на пальцах объясняется как пощупать железный USB и сохранить желание разбираться дальше.
Источник
USB-Serial Port adapter (RS-232) in Ubuntu Linux
 There are two other articles on a serial port adapter for Windows. Below is the instructions for Linux and how to connect your serial adapter while using Linux. This should work for most people using Linux and a serial adapter or usb to rs232 driver which is being discussed.
There are two other articles on a serial port adapter for Windows. Below is the instructions for Linux and how to connect your serial adapter while using Linux. This should work for most people using Linux and a serial adapter or usb to rs232 driver which is being discussed.
 USB to RS 232 driver Linux
USB to RS 232 driver Linux
 USB to RS 232 driver Linux
USB to RS 232 driver Linux1. Log into Linux under the root account;
2. Plug the USB-Serial adapter into the computer;
3. Give it a minute to discover the USB-Serial adpater;
4. Type in this command dmesg
5. The dmesg command will echo back the most recent few lines of the system message console, and you should see something like this:
- usb 2.0: new full speed USB device using uhci and address 2
- usb 2.0: configuration #1 chosen from 1 choice
6. Unplug the USB-Serial adapter to see a list of USB devices without it being plugged in.
7. Type this command to list the USB devices: lsusb
8. You should see a list of USB devices that looks like this:
- Bus 001 Device 001: ID 0000:0000
- Bus 002 Device 007: ID 03f0:4f11 Hewlett-Packard
- Bus 002 Device 006: ID 05e3:1205 Genesys Logic, Inc. Afilias Optical Mouse H3003
- Bus 002 Device 004: ID 15d9:0a33 Logitec-mouse
9. Then plug the USB into our device Then use the lsusb command again and observe the changes
- Bus 001 Device 001: ID 0000:0000
- Bus 002 Device 007: ID 03f0:4f11 Hewlett-Packard
- Bus 002 Device 003: ID 018a:3754 Unknown device
- Bus 002 Device 006: ID 05e3:1205 Genesys Logic, Inc. Afilias Optical Mouse H3003
- Bus 002 Device 004: ID 15d9:0a33 Logitec-mouse
10. Determine the vendor ID and the product ID by inspecting this additional line. In this example they are 018a and 3754. For a Trip•Lite USB-Serial adapter, they are 2303 and 067B. In this example it is a Minicom USB-Serial device. The first numbers identifies the vendor and the second numbers identifies the product.
11. Now use the following command to load the kernel module called usb serial and pass the vendor and product ID values to it. The driver can then associate itself with the correct hardware device on the USB bus.
- sudo modprobe usbserial vendor=018a product=3754
12. Now c heck whether the new Serial Port device is available
- sudo dmesg | grep ttyUSB
13. You should now see something like this
- usbserial_generic 1-1:1.0: generic converter detected
- usb 1-1: generic converter now attached to ttyUSB0
- usbcore: registered new interface driver usbserial_generic
14. This tells you that the serial device has now been mapped to the /dev/ttyUSBO serial port
15. Now we want to list the devices under the /dev/ path to see if the interface is visible with this command:
18. Instruct Ubuntu to load this module automatically by including the following line in the /etc/modules file. Substitute your own vendor and product ID if they are different.
- usbserial vendor=018a product=3754
That should be about it however if you have not installed the driver then you would have to install it now. If you are installing a Minicom serial device then you would do the following:
- sudo apt-get install minicom
- sudo minicom -s
Press A and then edit to / dev / ttyUSB 0 ( this value, see dmesg | grep ttyUSB )
Press E and then edit to 9600 8N1
Press F and the value will change from Yes to No
Once set up and finish off mode serial port setup.
Save setup as df1 finished off. Settings by Exit from Minicom
Other Issues:
This is for Ubuntu Linux for Red Hat the drivers should be in your OS however TrippLite does have Red Hat drivers on their website if you do not have them on your system.
If you are trying to connect a Zigbee through this serial port you can do the following:
Make a symbolic link between ttyUSB0 and com2 by typing in terminal: (assuming you are using com2)
- ln -s /dev/ttyUSB0 /home/your_home/.wine/dosdevices/com2
Источник
Работа с СОМ-портом на Си в linux

Телетайп, на который БЭВМ могли выводить и получать данные. Фото взято здесь.
Каждый, кто постоянно занимается электроникой и программирует встраиваемые устройства, неизбежно сталкивается с необходимостью работы с СОМ-портом под линуксом. Недаром, моя статья «UART и с чем его едят» спустя 11 лет после выпуска набирает просмотры и комментарии.
Для разработчиков чаще всего появляется задача сопрячь какой-то датчик, либо удалённое устройство с одноплатником. Да что греха таить, сейчас в 2021 году UART, наверное, самый распространённый интерфейс для обмена данными, несмотря на всю его архаичность. Далеко за примером ходить не надо, внутри смартфона, лежащего у вас в кармане, будет с десяток UART интерфейсов, самый известный из которых — это подключение SIM-карты.
Поэтому умение работать с СОМ-портами в linux особенно важно. И вот, казалось бы, UART, древнейший интерфейс, всё должно быть известно и понятно, и даже опытные программисты ломают зубы, работая с ним в линуксе. Особенный цирк с конями начинается при работе с передачей сырых данных по RS-485. Не знаю ни одного программиста, который бы не хватил горя при разработке ПО для таких решений. Самое забавное, что с более новомодным i2c работать в линуксе куда проще и понятнее, чем с ортодоксальным UART. Чтобы не было путаницы дальше, всё семейство UART (RS-232, RS-485, UART 5V, UART 3,3 и т.д.) по тексту я буду называть COM-порт или UART. Мы говорим в статье не о физическом интерфейсе, а о программной стороне вопроса.
В этой статье я хочу показать, как писать свои программы, работающие с UART в ОС Linux. И неважно на каком языке вы пишете программу для работы с UART (python, c, c++, bash, php, perl и т.д.), принцип работы и грабли будут одни и те же, так как всё равно всё упирается в системные вызовы к ядру. А непонимание того, что там происходит и приводит к различным трудноуловимым багам.
Исторически сложилось, что СОМ-порт в UNIX использовался как терминал (смотри фотографию в заголовке). То есть, как устройство для отображения и получения информации работы с ЭВМ. Отсюда идёт всё базовое наследие работы UART.
▍ Основы ввода-вывода в linux: всё есть файл
Принцип операционных систем типа Unix (и GNU Linux вместе с ними): всё есть файл. Файл может быть регулярным на диске, к которому мы все привыкли, файлом может быть канал (именованный или не именованный) для передачи данных, передача данных по сети, тоже по сути, работа с файл-сокетом (только не именованным). Таким образом, разобравшись с функциями работы с файлами, мы частично разберёмся с работой СОМ-порта.
Файл можно: создать, открыть, закрыть, удалить, прочитать и записать в файл. Всё это системные вызовы в ядро, для работы с данными, которые хранятся или передаются с помощью файла. Поскольку создание и удаление файла нас не интересует, далее их не рассматриваю. Этим системным вызовам соответствуют следующие имена функций. Привожу пример, вместе с заголовочными файлами, где они описаны:
Принимает на вход имя файла, флаги опции открытия, и, если расширенная функция, то и права доступа. Но нас это тоже пока не волнует. Возвращает дескриптор (описатель) открытого файла, число больше нуля. В любом другом случае – это ошибка открытия файла.
Закрывает файл, на вход принимает дескриптор файла. Возвращает нуль в случае успеха.
Самые интересные системные вызовы для нас — это чтение и запись.
read() пытается записать count байтов файлового описателя fd в буфер, адрес которого начинается с buf.
Если количество count равно нулю, то read( ) возвращает это нулевое значение и завершает свою работу. Если count больше, чем SSIZE_MAX, то результат не может быть определён.
При успешном завершении вызова возвращается количество байтов, которые были считаны (нулевое значение означает конец файла), а позиция файла увеличивается на это значение. Если количество прочитанных байтов меньше, чем количество запрошенных, то это не считается ошибкой: например, данные могли быть почти в конце файла, в канале, на терминале, или read() был прерван сигналом. В случае ошибки возвращаемое значение равно -1, а переменной errno присваивается номер ошибки. В этом случае позиция файла не определена.
❒ Обратите внимание! Количество запрашиваемых байт на чтение может не соответствовать реальному количеству считанных байт. Оно будет меньше, либо равно запрошенному.
write записывает до count байтов из буфера buf в файл, на который ссылается файловый дескриптор fd.
В случае успешного завершения возвращается количество байтов, которые были записаны (ноль означает, что не было записано ни одного байта). В случае ошибки возвращается -1, а переменной errno присваивается соответствующее значение.
❒ Следует помнить, что запись байт не гарантирует, что все байты будут записаны. Следует также контролировать количество байт, которое было записано, и в цикле дописывать их до окончания.
С точки зрения ядра, функции read и write осуществляют копирование данных из ядра в пространство пользователя (для чтения), и копирование из пространства пользователя в ядро (в случае записи). Таким образом, важно понимать, что функция записи не гарантирует реальную запись в устройство, а только копирование во внутренние буфера ядра. И в случае чтения из файл-устройства порта, вы читаете не физически из устройства, а просто копируете накопленные данные, которое драйвер ядра уже получил из порта ввода-вывода, и сложил во внутренний буфер.
Файл-устройство COM-порта
Как уже было сказано, в ОС Linux всё есть файл. Файл-устройство COM-портов обычно располагается в каталоге с именем /dev/tty* , где вместо звёздочки может стоять любая последовательность символов или её не быть вовсе. Эти устройства обладают сходным интерфейсом, который был выведен десятилетия назад для последовательных терминалов TeleType (см. фотографию в начале поста) и получил название tty . Реализация конечного имени устройства зависит от текущей реализации операционной системы. Например, классический COM1 в Ubuntu выглядеть, как /dev/ttyS0 . А если подключить USB-COM переходник, то файл-устройство будет иметь имя /dev/ttyUSB0 , конечно, если он единственный в системе, либо другой порядковый номер на конце, если воткнуто несколько шнурков. Часто, составные устройства (например, lte-модемы), определяются как /dev/ttyACM0 .
Если вы откроете виртуальный терминал и просто введёте:
то увидите множество файл-устройств. К одному из них подключён ваш виртуальный терминал — это файл-устройство “/dev/tty”. Проще говоря, стандартные потоки ввода-вывода и стандартный поток ошибок идёт в это файл-устройство. В данном случае командная оболочка (в моём случае bash) использует его для ввода-вывода. Можем в этом убедиться введя:
Здесь мы командой echo вывели сообщение и перенаправили его в файл /dev/tty , в результате получили его на экране нашего терминала. Если вспомнить, как было всё организовано раньше, то терминал «подключён» к СОМ-порту и представляет собой пассивную железку, что к нему приходит, то он и выводит. Точно так же отправляет сырые данные, введённые с клавиатуры. Таким образом, когда мы записали данные с помощью команды “echo” в файл-устройство (системный вызов write), то эти данные были отправлены на виртуальный порт и мы их увидели на экране нашего терминала.
Теперь важный момент: вы, наверняка знаете, что если работает некоторая программа и нажать ctrl-c, то программа получает SIGINT. Как же это работает? Если вы заметите, то набирая ctrl-c, вы посылаете символ «^c»: ETX (Конец текста, посылает сигнал уничтожения), ASCII 0x03. Драйвер СОМ-порта видя получение этого символа, посылает сигнал программе, которая сейчас владеет вводом-выводом. Таким образом, драйвер терминала может управляться специальными символами.
Получение этих специальных символов, может очищать экран, менять цвет выводимых символов и т.д. Например, следующие символы могут выполнять следующие действия:
- (ctrl-c) ^C → ETX (Конец текста, посылает сигнал уничтожения), ASCII 0x03
- (ctrl-d) ^D → EOT (Конец передачи, завершает ввод), ASCII 0x04
- ^H → BS (Backspace, \b ), ASCII 0x08
- ^J → LF (подача линии, \n ), ASCII 0x0A
- ^L → FF (канал формы, новая страница, очистка терминала), ASCII 0x0C
- ^M → CR (возврат каретки, \r ), ASCII 0x0D
Как несложно догадаться, если в сыром режиме передачи данных эти символы будут переданы, то драйвер последовательного порта пошлёт нашей программе такие сигналы, и не известно, к чему это может привести.
Поэтому необходимо конфигурировать СОМ-порт для работы в сыром режиме, и не обрабатывать эти символы. Конфигурацию текущего терминала в консоли можно посмотреть командой:
И на выходе мы получим следующий результат:
Обратите внимание: несмотря на то что данное файл-устройство виртуальное, и не имеет реального воплощения в железе, у него всё равно есть скорость и управляющие флаги. Это флаги структуры termios. Как работать с этими флагами, что они значат и для чего нужны, мы разберёмся в следующей главе.
Рекомендую запомнить эту команду. Если какая-то программа меняет настройки порта, то они сохраняются и наследуются дальше. Например, если программа переводит терминал в «неканонический режим», то если она не вернёт настройки терминала, то он так и останется в этом режиме, и остальные программы будут уже работать с такими настройками.
В моей практике была ситуация, когда я создавал программу, для работы с удалённым устройством через СОМ-порт. И при отладке, работа с данным устройством шла нестабильно: то работала, то нет. Параллельно проверял работу с ним отдельной программой cutecom и с ней всё работает как часы, но до её запуска, у меня ничего не работало. И вдруг я понял, что после того как я поотлаживал её, внезапно у меня всё заработало!
Это означало, что этот софт ставит какие-то дополнительные флаги, которая моя программа не ставила. И на помощь пришла утилита stty. Получаем параметры порта до запуска cutecom, после инициализации моей программой и после запуска. Смотрим разницу:
В результате оказалось, что программа cutecom снимает флаг ISIG и устанавливает флаг IGNBRK . Так что даже на этапе отладки бывают подставы.
▍ Работа с файл-устройством терминала
Все манипуляции tty осуществляются с помощью одной структуры struct termios , а также нескольких функций, определённых в заголовочном файле . Из этих функций широко применяются только шесть. Когда не нужно устанавливать скорость передачи данных по линии, используются только две наиболее важные функции — tcgetattr() и tcsetattr() .
Почти в каждом случае программы должны использовать tcgetattr() для получения текущих установок устройства, модифицировать эти установки, а затем применять tcsetattr() для активизации модифицированных установок.
Для того чтобы понять как конфигурировать файл-устройства терминала (телетайпа, СОМ-порта, как будет угодно), разберём синтетический пример.
Давайте разберём, что же делает данная программа: она переводит терминал ввода-вывода в неканонический режим, отключая эхо показа клавиш на экране, блокируя все специальные символы, вызывающие сигнал, и ожидает в цикле ввода всего одного символа «q» для выхода.
Работа программы выглядит так:
Завершить работу программы комбинациями клавиш ctrl-c, ctrl-d и другими невозможно, так как драйвер терминала не обрабатывает соответствующие сигналы. На экране введённая информация не отображается. После завершения работы терминал восстанавливает своё первоначальное состояние.
Разберём код программы.
Здесь мы создаём два экземпляра структуры termios. Для того, чтобы сохранить текущее состояние нашего терминала и потом иметь возможность его восстановить и новое.
С помощью функции fileno(stdin) мы получаем дескриптор файла стандартного потока вывода, а функция tcgetattr получает текущие установки устройства в структуру oldsettings.
Здесь мы снимаем флаги локального эха, снимаем флаг канонического режима терминала и отключаем получение сигналов. Подробнее о флагах структуры termios можно посмотреть тут.
Здесь указывается минимальное количество символов, которое будет передано за раз — для неканонического ввода (то количество символов, которое будет отдано функции read до истечения таймаута VTIME ). А также таймаут, в децисекундах, после которого будет отдано накопившееся количество символов функции read . Если символов нет, то read вернёт нуль (см. главу «Основы ввода-вывода в linux: всё есть файл»).
Это место немного сложное, поясню. Если у нас не будет ввода, то функция read будет считывать нуль символов, каждые 0,1 с. Если символ приходит, то функция read будет срабатывать при каждом 1-м символе. Если функция read блокирующая!
Записываем новые настройки в наш терминал.
Здесь идёт открытие файл-устройства «/dev/tty» c помощью функции open только для чтения. Можно было также разыменовать дескриптор стандартного ввода через fileno , но сделал так для наглядности. После этого, в цикле мы производим блокирующее чтение из этого файл-устройства по одному символу, пока не получим считанный символ, равный ‘q’.
Восстанавливаем настройки терминала.
▍ Создадим настоящее устройство передачи данных
Предыдущий пример, хоть и был синтетическим, тем не менее часто используется, особенно при вводе паролей, либо при работе с псевдографикой в терминалах. Но наша задача, всё же, получить работу с живым реальным устройством. Для этого на Arduino сделаем вот такой скетч:
Мы просто шлём строку «01234567890123456789\n\r» на скорости 9600 каждые две секунды. Умышленно сделал ASCII-символы, чтобы было проще отлаживать.
В терминале вводим:
Таким образом, мы можем в реальном времени мониторить сообщения ядра. Подключаем Arduino-плату к нашему компьютеру и видим следующие сообщения:
Для нас самая главная информация, что нас СОМ-порт определился, как ttyUSB0 и обитает он соответственно в /dev/ttyUSB0.
Для того чтобы с этим файл-устройством можно было работать не из-под root , надо добавить вашего пользователя в группу dialout . Для этого введём команду
И после этого необходимо завершить сеанс, чтобы изменения вступили в силу. Лично я хардкорщик, и просто ребутаю систему.
После успешной перезагрузки, можно проконтролировать корректность работы этого порта. Зададим скорость порта и попробуем прочитать из него содержимое.
Сообщения появляются раз в две секунды, значит всё корректно работает.
Небольшой полезный хак. Если требуется читать и анализировать сырые данные штатными средствами (без установки дополнительного ПО), то можно использовать программу hexdump :
▍ Простейший пример блокирующего чтения из СОМ-порта
Разберём пример блокирующего чтения из COM-порта был взят отсюда и немного модифицирован. Все исходники будут доступны в отдельном репозитории к этой статье.
Блокирующее чтение, как следует из названия, блокирует программу в системном вызове read до тех пор, пока не появятся данные, которые может получить read. Если данных нет, то этот вызов будет ждать вечно и ничего работать не будет. Этот режим работы наиболее прост для понимания работы с СОМ-портом, и с него лучше всего начинать работать. Примеры работы с портом, разобранные выше, тот же cat и hexdump используют именно блокирующее чтение. Однако, на практике в реальных задачах, такое чтение применяется достаточно редко.
Разберём основные части кода SerialPort_read.c:
Обратите внимание на флаги открытия: O_RDWR – открываем для чтения и записи, O_NOCTTY – терминал не может управлять данным процессом (тот терминал, с которого мы запускаем это приложение, может управлять процессом, например, послать сигнал при комбинации ctrl-c).
Инициализируем структуру termios и получаем текущие значения структуры.
Задаём скорость на чтение и на запись. Обратите внимание, что скорости на чтение и на запись могут быть разными. Также скорость задаётся макросами, начинающиеся с символа “B” (они описаны в termios.h). Могут принимать следующие значения:
Нулевая скорость, B0, используется для завершения связи.
Далее идут стандартные настройки порта:
Отключаем бит чётности (если флаг очищен).
Если флаг установлен, то стоп-бит равен двум, если очищен (в этом случае), то равен одному.
Очищаем маску размера данных.
Устанавливаем размер передаваемых данных, равный восьми битам.
Отключаем аппаратное управление потоком данных (RTS/CTS).
Включаем приёмник, игнорируем контрольные линии модема.
Отключаем управление потоком данных при вводе и выводе, отключаем возможность символов запускать ввод.
❒ Частая ошибка: Разница между c_iflag и c_lflag , пишутся практически одинаково, и без проблем скомпилируются, если вы поставите не те флаги, но работать не будет. В коде очень часто бывают подобные ошибки (в т. ч. и у меня).
Переводим терминал в неканонический режим (мы это уже разбирали).
Отключаем режим ввода, определяемый реализацией по умолчанию.
Теперь самое интересное (с этими параметрами мы ещё поиграемся). Хоть мы их разбирали уже, посмотрим какое будет поведение у них в нашем случае.
Считываем за раз только 40 символов.
Считываем каждую секунду. То есть, если значение отличное от нуля, функция read будет разблокирована по этому значению в децисекундах.
Записываем значение структуры termios .
Вы осознаёте теперь всю сложность работы с COM-портом? При этом мы не разобрали даже половины его возможностей, а уже это оказывается дико сложным. В любом случае придётся внимательно разобраться со всеми флагами структуры termios , чтобы понять, как корректно работать с портом.
Чтение у нас происходит в бесконечном цикле:
Скомпилируем и посмотрим, что же она будет у нас считывать.
Таким образом, при данных настройках корректно вычитывает наше сообщение.
Аналогично запись (системный вызов write) может быть блокирующей и не блокирующей, но в данном случае это не очень критично, так как после копирования данных в буфер ядра запись разблокируется.
▍ Программные способы перехвата сообщений в порту
Для отладки передаваемых сообщений через COM-порт удобно использовать перехватчик протокола. В простейшем виде, это могут быть ещё два дополнительных СОМ-порта, которые слушают передачу. Но существуют и программные средства, причём кроссплатформенные. Лично я рекомендую программу IO Ninja Serial Monitor:
Для начала необходимо установить модули ядра, для этого качаем архив tdevmon, собираем его и делаем insmod для собранного драйвера. Подробнее вот тут.
После чего запускаем программу ioninja, несколько кликов мышью, и всё отлично работает!
▍ Как сделать неблокирующее чтение?
Неблокирующее чтение отличается от блокирующего чтения тем, что если в буфере ядра linux нет данных, то функция read не будет ожидать их получения и сразу вернёт управление программе. С одной стороны, это очень удобно, но с другой, если вы ожидаете посылку, то вам придётся в цикле читать, пока не получите данные. Для этих целей существует такие вещи как — select, poll и epoll. В рамках этой статьи нет возможности разобрать работу с ними, поэтому буду краток.
В своём вебинаре о работе с СОМ-портом (ссылки будут ниже), я разбирал пример чтения карт-ридера магнитных карт. Там у меня уже готовая библиотека работы с СОМ-портом. Её мы и разберём. Пример обитает тут.
Не буду разбирать подробно всю программу, пробегусь по основным моментам. Остальное в ней всё достаточно очевидно, и многое мы уже разобрали. Всё будет в файле uart.c.
Чтобы перевести СОМ-порт в неблокирующий режим, после открытия порта, нам необходимо файловый дескриптор перевести в режим неблокирующего чтения. Это делается с помощью функции.
Таким образом, теперь, мы будем выходить сразу, после функции read, вне зависимости есть у нас данные или нет.
Сейчас стоит задача ожидать данные в буфере ядра, и если их нет то выходить по какому-то таймауту, возвращая управления программе. Для этого напишем следующую функцию.
На вход функция принимает файловый дескриптор открытого порта, длину запрашиваемых данных, таймаут в миллисекундах, после которого возвращается управление системе и указатель на буфер, куда будут считаны данные.
Управление осуществляется с помощью структуры:
В неё мы записываем файловый дескриптор, который хотим мониторить.
Указываем, то что мы хотим мониторить событие получение данных:
И, соответственно, взводим наш «сторожевой таймер».
Из этой функции мы выйдем либо по таймауту, либо по получению данных.
Дальше мы проверяем событие, которое произошло. И если событие соответствует POLLIN, то производим чтение данных.
И после чего возвращаем количество считанных данных или нуль в случае ошибки или нуля данных. Это не очень корректно, так как всё же лучше обработать все возникающие ошибки, а не отправлять нуль. Но это тестовый пример и можно так сделать.
Аналогичная функция есть и для записи. Для чего это нужно, ведь мы просто копируем данные в ядро? Да очень просто, если у вас режим передачи RS-485 управляется линией DTR/RTS, либо GPIO, то вы должны точно знать, когда данные были отправлены, чтобы правильно выставить эти пины, меняя режим передачи на приём. Выглядит это всё следующим образом.
Здесь poll настроен на передачу. Единственное, на что стоит обратить внимание, это на вызов функции tcdrain(fd); Эта функция будет ожидать, пока все данные вывода, записанные на объект, на который ссылается fd , не будут переданы. Функцию int set_rts(int fd, int on) мы разберём в следующей главе.
▍ Как подрыгать ножкой DTR и RTS, а также пара слов о RS-485
Кроме системных вызовов read и write , есть системный вызов ioctl , который позволяет осуществлять тонкую настройку. Будем честны, вот эта работа со структурой termios , внизу имеет системный вызов ioctl , который записывает все настройки в ядро. Но это от нас скрыто библиотечными функциями. Системный вызов ioctl не стандартизован и очень опасен, но позволяет производить тонкую настройку порта. Приведу пример функции установки или снятия сигнала rts.
Изначально мы получаем состояние флагов порта в переменную &flags .
После чего, либо снимаем флаг состояния TIOCM_RTS, либо устанавливаем его.
И после этого записываем его
Аналогично выглядит функция работы с сигналом DTR.
С RS-485 в линуксе всё обстоит неважно. Этот интерфейс совершенно не стандартизирован, и каждый производитель может делать всё, что захочет. Где-то его нужно инициализировать в ядре, и драйвер ядра будет автоматически переключать приёмо-передатчик, где-то это всё реализовано аппаратно. Тут всё как бог на душу положит. Поэтому, с RS-485 приходится разбираться на месте. Но моя практика показывает, что всё написанное в документации – не актуально. Единственный эффективный путь – это лезть в код ядра и смотреть, что же там происходит на самом деле.
▍ Выводы
Очень сложно в рамках маленькой статьи рассказать о таком сложном явлении в linux, как работа с терминалами. Получается так, что надо сначала понять почему COM-порт не порт, а на самом деле терминал, и как его превратить обратно в порт. Этот терминал имеет множество режимов работы и функционала. И, в силу исторических причин, несёт это огромное наследие дальше. Работа с другими интерфейсами в linux (тем же i2c сильно проще). Реальная работа с железом, именно с портами идёт в драйверах внутри ядра linux. Здесь мы взаимодействуем с интерфейсом, который предоставляет нам драйвер.
Если хочется сделать красиво, то правильно будет чтение из порта осуществлять в отдельном программном потоке, а основная программа будет работать в другом потоке. Дальше уже передачу данных осуществлять с помощью междупоточного взаимодействия. Тут можно и посылать сигналы основному потоку, после получения данных (аналог прерывания по получению), либо любое другое приятное решение на любой вкус и цвет.
Для тех, кто ничего не понял в этой статье, либо просто хочет расширить свой кругозор, рекомендую посмотреть мой вебинар о программировании СОМ-портов под линукс. Там я достаточно подробно и с живыми примерами рассказываю об особенностях работы с ними.
Примеры к данным видео можно найти вот тут.
Все программы, которые продемонстрированные были в данной статье можно найти у меня на гитхабе.
Источник



