- Работа с последовательным портом в windows и linux
- Windows работа с com портами
- Windows работа с com портами
- Комментарии
- COM-порт в Windows (программирование)
- Содержание
- Открытие порта [ править ]
- lpFileName [ править ]
- dwDesiredAccess [ править ]
- dwShareMode [ править ]
- lpSecurityAttributes [ править ]
- dwCreationDistribution [ править ]
- dwFlagsAndAttributes [ править ]
- hTemplateFile [ править ]
- Закрытие порта [ править ]
- Пример открытия/закрытия на языке C [ править ]
- Структура DCB [ править ]
- DCBlength [ править ]
- BaudRate [ править ]
- fBinary [ править ]
- fParity [ править ]
- fOutxCtsFlow [ править ]
- fOutxDsrFlow [ править ]
- fDtrControl [ править ]
- fDsrSensitivity [ править ]
- fTXContinueOnXoff [ править ]
- fOutX [ править ]
- fInX [ править ]
- fErrorChar [ править ]
- fNull [ править ]
- fRtsControl [ править ]
- fAbortOnError [ править ]
- fDummy2 [ править ]
- wReserved [ править ]
- XonLim [ править ]
- XoffLim [ править ]
- ByteSize [ править ]
- Parity [ править ]
- StopBits [ править ]
- XonChar [ править ]
- XoffChar [ править ]
- ErrorChar [ править ]
- EofChar [ править ]
- EvtChar [ править ]
- wReserved1 [ править ]
- Замечания [ править ]
- Заполнение структуры DCB [ править ]
- Структура COMMTIMEOUTS [ править ]
- Заполнение структуры COMMTIMEOUTS [ править ]
- Пример настройки порта [ править ]
- Структура COMMPORT [ править ]
- Стандартный диалог настройки порта [ править ]
- Выделение памяти для структуры COMMPORT [ править ]
- Прием и передача данных [ править ]
- Сброс порта [ править ]
- Пример настройки порта и выполнения чтения/записи данных [ править ]
Работа с последовательным портом в windows и linux
Часто бывает необходимо, чтобы работа с устройством поддерживалась как в windows, так и в linux. В моем случае нужно было обеспечить работу com-порта в приложении, написанном на с/с++ с использованием кроссплатформенной библиотеки QT. Штатной поддержки программирования портов в QT нет (да и ни к чему это). Поэтому в win32 для работы с портом будем использовать средства WinAPI. В linux системах же, как известно для работы с устройствами используются специальные файлы.
Итак, взяв на вооружение всем знакомый gcc и его windows-аналог mingw, напишем нехитрый код.
Код будет довольно таки искусственным, т.к. ставится цель не более, чем показать принципы работы с com-портами в двух операционках. Для управления компилятором будем использовать директивы определения компилятора и ОС (__MINGW32__ и __linux). Com-портом в нашем случае является устройство dev/ttyS0 и COM1.
Инициализация
#ifdef __MINGW32__
HANDLE hSerial = CreateFile(«COM1»,GENERIC_READ | GENERIC_WRITE,0,NULL,OPEN_EXISTING,0,NULL);
if (hSerial == INVALID_HANDLE_VALUE) <
printf(«Error opening port\r\n»);
return -1;
>
#endif
#ifdef __linux
int fd = open(«/dev/ttyS0», O_RDWR | O_NOCTTY );
if (fd
Здесь в win32 используется функция CreateFile, параметры по ссылке в коде. Функция возвращает хендл на на устройство, в которым мы дальше будем работать. Аналогично работает и open в linux.
Запись
Для записи в порт используем ранее возвращенный хендл и пишем соответствующими функциями.
Процедура чтения выглядит аналогично.
Чтение
Закрытие порта
#ifdef __MINGW32__
CloseHandle(hSerial);
#endif
#ifdef __linux
close(fd);
#endif
Кроме того, существуют функции для настройки самих портов. Об их использовании я, возможно, напишу в следующих статьях. В нашем примере все работает по стандартным настройкам системы.
Осталось дело за малым — скомпилировать код под каждую из ОС.
Надеюсь, что эта практика пригодится кому-то, кроме меня самого.
Приятного си-программирования!
Данная статья не подлежит комментированию, поскольку её автор ещё не является полноправным участником сообщества. Вы сможете связаться с автором только после того, как он получит приглашение от кого-либо из участников сообщества. До этого момента его username будет скрыт псевдонимом.
- 25 января 2021 в 00:21 Мой первый опыт с Linux. Настройка Ubuntu Sever 20.04, подключения по SSH и удаленное подключение к базе данных
- 1 марта 2021 в 18:45 «Красивые» дистрибутивы Linux
- 18 февраля 2021 в 01:17 Дистрибутивы Linux для новичков в 2021 году
- 5 марта 2021 в 15:13 Проброс портов без белого IP — моя история
- 18 апреля 2021 в 16:34 Linux в AD, подводный камень
Это «Песочница» — раздел, в который попадают дебютные посты пользователей, желающих стать полноправными участниками сообщества.
Если у вас есть приглашение, отправьте его автору понравившейся публикации — тогда её смогут прочитать и обсудить все остальные пользователи Хабра.
Чтобы исключить предвзятость при оценке, все публикации анонимны, псевдонимы показываются случайным образом.
Не надо пропускать:
- рекламные и PR-публикации
- вопросы и просьбы (для них есть Хабр Q&A);
- вакансии (используйте Хабр Карьеру)
- статьи, ранее опубликованные на других сайтах;
- статьи без правильно расставленных знаков препинания, со смайликами, с обилием восклицательных знаков, неоправданным выделением слов и предложений и другим неуместным форматированием текста;
- жалобы на компании и предоставляемые услуги;
- низкокачественные переводы;
- куски программного кода без пояснений;
- односложные статьи;
- статьи, слабо относящиеся к или не относящиеся к ней вовсе.
Windows работа с com портами
Терминал (для работы с COM портом) под Windows.
Зачем понадобилось создавать еще одну программу терминал .
На просторах интернета полно подобных программ ?!
Что есть, то есть !
Но есть маленькое НО, все дело в нюансах !
— Требуемый функционал был разбросан по нескольким программам и это было очень не удобно.
— Часть требуемых функций не было и вовсе.
— Часть программ банально падали в самый неподходящий момент.
— Часть функций реализованы с ошибками.
Так жить нельзя и работать тоже . 🙂
Значит надо создать свою программу, с необходимым функционалом.
Данный проект задумывался как вспомогательный для тестирования большого проекта связанного
с телеметрией. В проекте требовалось принимать и передавать данные через COM порт компьютера.
Проект готов и сдан. Программа осталась и продолжает использоваться по назначению, для отладки
разного рода устройств !
На текущий момент программа продолжает дорабатывается, исправляются ошибки, добавляются
В данной статье будут публиковаться все изменения и нововведения сделанные в программе.
Краткое описание программы.
Программа создана в среде Microsoft Studio 2008, на языке VB.
Репозитарий программы представлен на GitHub, готовый бинарный файл(exe) в виде Zip архива.
Собранная программа представляет из себя один запускаемый файл.
Программа не требует установки и работает из любого места.
Программа не требует для запуска привилегий администратора.
1. Подключаться к любому com порту в системе.
2. Выставлять параметры работы com порта, включая нестандартные скорости работы порта
(при условии что драйвер windows поддерживает нестандартные скорости).
3. Производить запись принимаемых данных в файл.
4. Передавать в порт строку с разными концовками в виде дополнительных кодов.
5. Циклически передавать в порт строку с заданным интервалом времени.
6. Передавать в порт файл.
Программа пока не может:
1. Разбирать ESC последовательности.
2. Вести историю передаваемых строк.
3. Передавать в порт кода нажатых клавиш в окне приема и передачи.
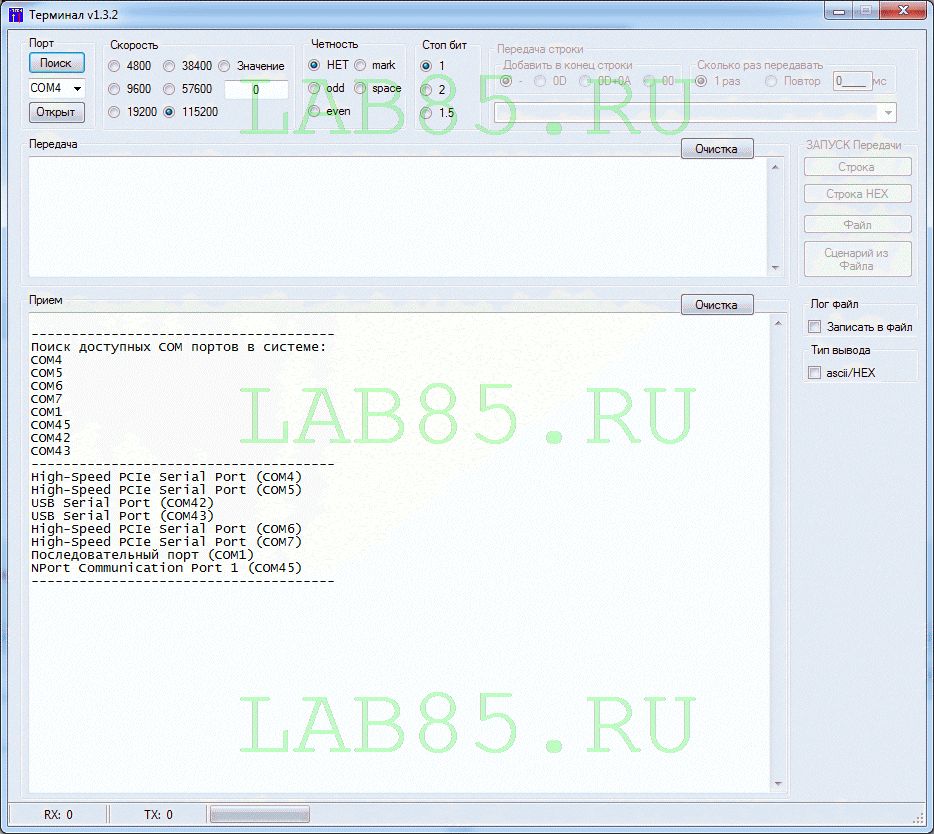
Текущая версия: v1.3.2
[+] Вывод подробного описания СОМ портов.
[+] Проигрывание сценария из текстового файла.
Пример сценария (Файл TXT), формат:
81 01 04 07 03 FF
> 100
81 01 04 07 02 FF
Где:
81 01 04 07 03 FF — значения байт в TXT-HEX формате отправляемых в СОМ порт.
> 100 — Формирование паузы 100 мс.
81 01 04 07 02 FF — значения байт в HEX формате отправляемых в СОМ порт.
[+] Перевод строки в TXT-HEX виде в байтовый массив и передача в СОМ порт.
Версия: v1.2.2
[+] Добавлена история ввода передаваемых строк.
Версия: v1.2.1
[+] Внесены изменения в интерфейс. Часть функций вынесены в окно приема.
[+] Добавлена функция Вкл/Выкл печати символа с кодом 0x0A.
0x0D + 0x0A -> 0x0D.
[+] Решено: При закрытии порта продолжалась передача в порт.
[+] Добавлена подсказка при наведении курсора на элементы управления.
[+] При запуске программы производится автоматический поиск СОМ портов в системе.
Версия: v1.1.0
[+] Добавлена передача в порт кодов нажатых клавиш в окне приема и передачи.
Windows работа с com портами
Эта статья показывает, как записывать и читать данные от устройства, подключенного к последовательному порту (COM-порт) из приложения на языке C# в среде .NET. Мы будем читать и записывать данные через TextBox на форме, и будем работать с потоками.

В недалеком прошлом для работы с Serial Port в среде .Net 1.1, мы должны были использовать либо Windows API, либо использовать управление из сторонних библиотек. В среде .Net 2.0 (и в более поздних версиях .NET) компания Microsoft добавила поддержку последовательного порта включением класса SerialPort как части пространства имен System.IO.Ports. Реализация класса SerialPort сделана очень прямо и очевидно. Чтобы создать экземпляр класса SerialPort class, просто передайте опции SerialPort конструктору класса:
Для приема данных нам нужно создать обработчик события EventHandler для «SerialDataReceivedEventHandler»:
Вы можете также установить другие опции, такие как ReadTimeout и WriteTimeout (таймауты чтения и записи):
Как только Вы готовы использовать последовательный порт, Вам нужно открыть его:
Сейчас мы готовы принять данные. Однако чтобы записать эти данные в область ввода TextBox на форме, нам нужно создать так называемого делегата (delegate). Библиотеки .Net не позволяют межпотоковое взаимодействие (cross-thread action), так что нам нужно использовать делегат. Делегат используется для записи в поток пользовательского интерфейса (User Interface, UI) из другого потока (не UI).
Мы создадим теперь метод «sp_DataReceived», который будет выполнен при поступлении данных в последовательный порт:
Теперь создадим наш метод «si_DataReceived»:
Мы можем теперь принять данные из последовательного порта от устройства и отобразить их на форме. Некоторые устройства отправляют данные сами, без запроса. Однако некоторым устройствам нужно отправить определенные команды, чтобы они ответили на них какими-то своими данными. Для этих устройств Вы будете записывать данные в последовательный порт, и будете использовать предыдущий код, чтобы получить данные обратно. В этом примере будет происходить обмен со шкалой. Для отдельной шкалы отправка команды «SI\r\n» приведет к возврату веса, который имеется на шкале. Эта команда является специфической именно для этого устройства, в Вашем же случае нужно читать документацию по протоколу устройства, чтобы найти команды, принимаемые устройством. Для записи в последовательный порт создайте кнопку «Start» на форме, и добавьте код в событие клика на ней Click_Event:
Это все, что нужно Вам сделать. См. ссылку [1] для загрузки готового проекта Microsoft Visual C# 2010.

[Как передавать по одному символу, с задержкой]
В случае, когда нужно реализовать обмен с устройством, рассчитанным на взамодействие с пользователем (управляющая консоль). Так как пользователь вводит символы команды медленно, устройство успевает принять все символы и обработать. Если передавать символы быстро (методом SerialPort.Write), по несколько байт, то есть риск потери данных. Во врезке ниже приведен пример класса COMdevice, где реализован метод Write, который передает символы через задержку.
[Как перекодировать символы ANSI в UTF8]
Очень часть устройства на микроконтроллерах передают русские символы в кодировке ANSI (Windows-1251). Однако среда разработки Visual Studio C# хранит и обрабатывает русскоязычный текст в кодировке UTF8, и при попытке отобразить принятый текст (методом ReadExisting) выводятся кракозябры.
Решить проблему можно, если организовать байтовый буфер, и перекодировать массив байт с помощью класса Encoding (методом GetEncoding(1251).GetString). Пример кода в классе COMdevice приведен во врезке ниже.
[Ссылки]
Комментарии
[quote name=»Владимир»]Не очень шарю в С/С++/С#. При запуске этого приложения выдает ошибку в textbox «Порт ‘COM1’ не существует.» Всё подключено в порт COM4. В Вашем приложении не предлагается выбор портов в ComboBox1, список пуст. Подскажите в чем может быть проблема.
COM-порт в Windows (программирование)
Написать программу, управляющую устройством через COM-порт, для MS-DOS не так сложно. С платформой Win32 дело обстоит сложнее. Но только на первый взгляд. Конечно напрямую работать с регистрами портов нельзя, Windows это не позволяет, зато можно не обращать внимания на тонкости различных реализаций (i8251, 16450, 16550A) и не возиться с обработкой прерываний.
Содержание
Открытие порта [ править ]
С последовательными и параллельными портами в Win32 работают как с файлами. Для открытия порта используется функция CreateFile . Эта функция предоставляется Win32 API. Ее прототип выглядит так:
lpFileName [ править ]
Указатель на строку с именем открываемого или создаваемого файла. Формат этой строки может быть очень «хитрым». В частности можно указывать сетевые имена для доступа к файлам на других компьютерах. Можно открывать логические разделы или физические диски и работать в обход файловой системы.
Последовательные порты имеют имена «COM1», «COM2», «COM3», «COM4», «COM5», «COM6», «COM7», «COM8», «COM9». Для доступа к портам, чей номер больше 9, необходимо указывать имя порта как «\\.\COMx», где x — номер порта. Например, «\\.\COM72» (в нотации языка C/C++ строка будет выглядеть «\\\\.\\COM72»). Такой синтаксис подходит для любого номера порта. Точно так же они назывались в MS-DOS. Параллельные порты называются «LPT1», «LPT2» и так далее.
dwDesiredAccess [ править ]
Задает тип доступа к файлу. Возможно использование следующих значений:
- 0 Опрос атрибутов устройства без получения доступа к нему.
- GENERIC_READ Файл будет считываться.
- GENERIC_WRITE Файл будет записываться.
- GENERIC_READ|GENERIC_WRITE Файл будет и считываться и записываться.
dwShareMode [ править ]
Задает параметры совместного доступа к файлу. Коммуникационные порты нельзя делать разделяемыми, поэтому данный параметр должен быть равен 0.
lpSecurityAttributes [ править ]
Задает атрибуты защиты файла. Поддерживается только в Windows NT. Однако при работе с портами должен в любом случае равняться NULL .
dwCreationDistribution [ править ]
Управляет режимами автосоздания, автоусечения файла и им подобными. Для коммуникационных портов всегда должно задаваться OPEN_EXISTING .
dwFlagsAndAttributes [ править ]
Задает атрибуты создаваемого файла. Также управляет различными режимами обработки. При работе с портом этот параметр должен быть или равным 0 , или FILE_FLAG_OVERLAPPED . Нулевое значение используется при синхронной работе с портом, а FILE_FLAG_OVERLAPPED при асинхронной, или, другими словами, при фоновой обработке ввода/вывода. Подробнее про асинхронный ввод/вывод я расскажу позже.
hTemplateFile [ править ]
Задает описатель файла-шаблона. При работе с портами всегда должен быть равен NULL .
При успешном открытии файла, в данном случае порта, функция возвращает дескриптор ( HANDLE ) файла. При ошибке [[| INVALID HANDLE VALUE ]]. Код ошибки можно получитить вызвав функцию [[| GetLastError ]].
Закрытие порта [ править ]
Открытый порт должен быть закрыт перед завершением работы программы. В Win32 закрытие объекта по его дескриптору выполняет функция CloseHandle :
При успешном завершении функция возвращает не нулевое значение, при ошибке нуль.
Пример открытия/закрытия на языке C [ править ]
В данном примере открывается порт СОМ2 для чтения и записи, используется синхронный режим обмена. Проверяется успешность открытия порта, при ошибке выводится сообщение и программа завершается. Если порт открыт успешно, то он закрывается.
Структура DCB [ править ]
Основные параметры последовательного порта описываются структурой DCB . Временные параметры — структурой COMMTIMEOUTS . Существует еще несколько информационных и управляющих структур, но они используются реже. Настройка порта заключается в заполнении управляющих структур и последующем вызове функций настройки.
Основную информацию содержит структура DCB :
Эта структура содержит почти всю управляющую информацию, которая в реальности располагается в различных регистрах последовательного порта.
DCBlength [ править ]
Задает длину, в байтах, структуры DCB . Используется для контроля корректности структуры при передаче ее адреса в функции настройки порта.
BaudRate [ править ]
Скорость передачи данных. Возможно указание следующих констант: CBR_110, CBR_300, CBR_600, CBR_1200, CBR_2400, CBR_4800, CBR_9600, CBR_14400, CBR_19200, CBR_38400, CBR_56000, CBR_57600, CBR_115200, CBR_128000, CBR_256000 . Эти константы соответствуют всем стандартным скоростям обмена. На самом деле, это поле содержит числовое значение скорости передачи, а константы просто являются символическими именами. Поэтому можно указывать, например, и CBR_9600 , и просто 9600 . Однако рекомендуется указывать символические константы, поскольку при компиляции программы проверяется корректность их имен.
fBinary [ править ]
Включает двоичный режим обмена. Win32 не поддерживает недвоичный режим, поэтому данное поле всегда должно быть равно 1 , или логической константе TRUE (что предпочтительней). В Windows 3.1, если это поле было равно FALSE , включался текстовый режим обмена. В этом режиме поступивший на вход порта символ, заданный полем EofChar , свидетельствовал о конце принимаемых данных.
fParity [ править ]
Включает режим контроля четности. Если это поле равно TRUE , то выполняется проверка четности, при ошибке, в вызывающую программу, выдается соответствующий код завершения.
fOutxCtsFlow [ править ]
Включает режим слежения за сигналом [[| CTS ]]. Если это поле равно [[| TRUE ]] и сигнал [[| CTS ]] сброшен, передача данных приостанавливается до установки сигнала CTS . Это позволяет подключеному к компьютеру прибору приостановить поток передаваемой в него информации, если он не успевает ее обрабатывать.
fOutxDsrFlow [ править ]
Включает режим слежения за сигналом [[| DSR ]]. Если это поле равно TRUE и сигнал DSR сброшен, передача данных прекращается до установки сигнала DSR .
fDtrControl [ править ]
Задает режим управления обменом для сигнала [[| DTR ]]. Поле может принимать следующие значения:
- DTR_CONTROL_DISABLE Сигнал DTR снимается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- DTR_CONTROL_ENABLE Сигнал DTR устанавливается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- DTR_CONTROL_HANDSHAKE Сигнал DTR автоматически устанавливается/снимается в ходе работы с портом. Не может быть изменён функцией EscapeCommFunction.
fDsrSensitivity [ править ]
Задает чувствительсть коммуникационного драйвера к состоянию линии [[| DSR ]]. Если это поле равно TRUE , то все принимаемые данные игнорируются драйвером (коммуникационный драйвер расположен в операционной системе), за исключением тех, которые принимаются при установленом сигнале DSR .
fTXContinueOnXoff [ править ]
Задает, прекращается ли передача при переполнении приемного буфера и передаче драйвером символа XoffChar . Если это поле равно TRUE , то передача продолжается, несмотря на то, что приемный буфер содержит более XoffLim символов и близок к переполнению, а драйвер передал символ XoffChar для приостановления потока принимаемых данных. Если поле равно FALSE , то передача не будет продолжена до тех пор, пока в приемном буфере не останется меньше XonLim символов и драйвер не передаст символ XonChar для возобновления потока принимаемых данных. Таким образом это поле вводит некую зависимость между управлением входным и выходным потоками информации.
fOutX [ править ]
Задает использование XON/XOFF управления потоком при передаче. Если это поле равно TRUE , то передача останавливается при приеме символа XoffChar , и возобновляется при приеме символа XonChar .
fInX [ править ]
Задает использование XON/XOFF управления потоком при приеме. Если это поле равно TRUE , то драйвер передает символ XoffChar , когда в приемном буфере находится более XoffLim , и XonChar , когда в приемном буфере остается менее XonLim символов.
fErrorChar [ править ]
Указывает на необходимость замены символов с ошибкой четности на символ задаваемый полем ErrorChar . Если это поле равно TRUE , и поле fParity равно TRUE , то выполняется замена.
fNull [ править ]
Определяет действие выполняемое при приеме нулевого байта. Если это поле TRUE , то нулевые байты отбрасываются при передаче.
fRtsControl [ править ]
Задает режим управления потоком для сигнала RTS. Поле может принимать следующие значения:
- RTS_CONTROL_DISABLE Сигнал RTS снимается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- RTS_CONTROL_ENABLE Сигнал RTS устанавливается при открытии порта. У открытого порта может быть изменён функцией EscapeCommFunction.
- RTS_CONTROL_HANDSHAKE Сигнал RTS автоматически устанавливается/снимается в ходе работы с портом. Не может быть изменён функцией EscapeCommFunction. Сигнал RTS устанавливается, когда приемный буфер заполнен менее, чем на половину, и снимается, когда буфер заполняется более чем на три четверти.
- RTS_CONTROL_TOGGLE Задаёт, что сигнал RTS установлен, когда есть данные для передачи. Когда все символы из передающего буфера переданы, сигнал снимается.
fAbortOnError [ править ]
Задает игнорирование всех операций чтения/записи при возникновении ошибки. Если это поле равно TRUE , драйвер прекращает все операции чтения/записи для порта при возникновении ошибки. Продолжать работать с портом можно будет только после устранения причины ошибки и вызова функции ClearCommError.
fDummy2 [ править ]
Зарезервировано и не используется.
wReserved [ править ]
Не используется, должно быть установлено в 0 .
XonLim [ править ]
Задает минимальное число символов в приемном буфере перед посылкой символа XON .
XoffLim [ править ]
Определяет максимальное количество байт в приемном буфере перед посылкой символа XOFF . Максимально допустимое количество байт в буфере вычисляется вычитанием данного значения из размера приемного буфера в байтах.
ByteSize [ править ]
Определяет число информационных бит в передаваемых и принимаемых байтах. Число информационных бит может быть в диапазоне от 4 до 8 .
Parity [ править ]
Определяет выбор схемы контроля четности. Данное поле должно содержать одно из следующих значений:
- EVENPARITY Дополнение до четности
- MARKPARITY Бит четности всегда 1
- NOPARITY Бит четности отсутствует
- ODDPARITY Дополнение до нечетности
- SPACEPARITY Бит четности всегда 0
StopBits [ править ]
Задает количество стоповых бит. Поле может принимать следующие значения:
- ONESTOPBIT Один стоповый бит
- ONE5STOPBIT Полтора стоповых бита
- TWOSTOPBITS Два стоповых бита
XonChar [ править ]
Задает символ XON используемый как для приема, так и для передачи. Обычно 0x11 ( 17 ).
XoffChar [ править ]
Задает символ XOFF используемый как для приема, так и для передачи. Обычно 0x13 ( 19 ).
ErrorChar [ править ]
Задает символ, использующийся для замены символов с ошибочной четностью.
EofChar [ править ]
Задает символ, использующийся для сигнализации о конце данных.
EvtChar [ править ]
Задает символ, использующийся для сигнализации о событии.
wReserved1 [ править ]
Зарезервировано и не используется.
Замечания [ править ]
Если структура DCB содержит конфигурацию для последовательного порта, совместимого с 8250, то к значениям полей ByteSize и StopBits применяются следующие ограничения:
- Количество информационных бит должно быть от 5 до 8 .
- Не допускается использование 5 информационных бит с 2 стоповыми битами, также как 6 , 7 или 8 информационных бит с 1,5 стоповыми битами.
Заполнение структуры DCB [ править ]
Структура COMMTIMEOUTS [ править ]
ReadIntervalTimeout — время в миллисекундах, задающее максимальное время, для интервала между поступлением двух символов по линии связи. Если интервал между поступлением каких-либо двух символов будет больше этой величины, операция ReadFile завершается и любые буферизированные данные возвращаются.
Чтобы операция ReadFile немедленно возвращала управление со всеми полученными данными (асинхронный режим) следует задавать следующие значения:
ReadTotalTimeoutMultiplier — Множитель, используемый, чтобы вычислить полный период времени простоя для операций чтения, в миллисекундах. Для каждой операции чтения, это значение умножается на затребованное число байтов, которые читаются.
ReadTotalTimeoutConstant — Константа, используемая, чтобы вычислить полный (максимальный) период времени простоя для операций чтения, в миллисекундах. Для каждой операции чтения, это значение добавляется к произведению члена структуры ReadTotalTimeoutMultiplier и прочитанного числа байтов.
Значение нуля и для члена ReadTotalTimeoutMultiplier, и для члена ReadTotalTimeoutConstant указывает, что полное время простоя не используются для операций чтения.
WriteTotalTimeoutMultiplier — Множитель, используемый, чтобы вычислить полный период времени простоя для операций записи, в миллисекундах. Для каждой операции записи, это значение умножается на число записываемых байтов.
WriteTotalTimeoutConstant — Константа, используемая, чтобы вычислить полный период времени простоя для операций записи, в миллисекундах. Для каждой операции записи, это значение добавляется к произведению члена структуры WriteTotalTimeoutMultiplier и записанного числа байтов.
Значение нуля и для члена WriteTotalTimeoutMultiplier, и для члена WriteTotalTimeoutConstant указывает, что полное время простоя не используются для операций записи.
Заполнение структуры COMMTIMEOUTS [ править ]
Вариант 1: (максимальная задержка при чтении и записи = TIMEOUT)
Вариант 2: Инициализация значениями (без задержки при чтении)
Пример настройки порта [ править ]
Структура COMMPORT [ править ]
Стандартный диалог настройки порта [ править ]
Для настройки параметров COM — порта может быть вызвано штатное окно Windows. Вызов осуществляется функцией CommConfigDialog(), которая в качестве параметров принимает имя настраиваемого порта, хендл родительского окна и указатель на структуру COMMCONFIG. Следует отметить, что для корректного вызова окна, структура COMMCONFIG должна быть заполнена значениями заранее. Настройку структуры можно выполнить вручную или при помощи функции GetCommConfig(). Например:
Выделение памяти для структуры COMMPORT [ править ]
Прием и передача данных [ править ]
Прием и передача данных для последовательного порта может выполнятся в синхронном или асинхронном режимах. Асинхронный режим позволяет реализовать работу по событиям, в то время как синхронный лишен этой возможности, но является более простым в реализации. Для работы в синхронном режиме, порт должен быть открыт следующим образом:
Предпоследний параметр dwFlagsAndAttributes должен быть равен 0. После успешного открытия порта, данные могут быть считаны или записаны при помощи функций ReadFile() и WriteFile().
Функция ReadFile/WriteFile осуществляет чтение/запись из файла (устройства) начиная с текущей позиции после окончания чтения обновляет указатель в файле.
Недостатком этого способа является то, что вызывая функцию ReadFile(), мы не знаем есть ли данные для чтения. Можно циклически проверять их наличие, но это приводит к дополнительным расходам времени ЦП. Поэтому на практике часто удобней использовать асинхронный режим. Для этого при вызове функции CreateFile() параметр dwFlagsAndAttributes должен быть равен FILE_FLAG_OVERLAPPED.
Далее, необходимо настроить реакцию порта на события при помощи функции SetCommMask() и используя функции WaitCommEvent() и WaitForSingleObject() ожидать событие или тайм аут. Например:
Сброс порта [ править ]
Пример настройки порта и выполнения чтения/записи данных [ править ]
Код для работы с COM-портом. Многострадальный, соответственно относительно простой и понятный, при этом обходит основные подводные камни. Надеюсь, может быть полезен.



